小鱼 ROS 2 新书上线!点击链接查看, 新书配套视频点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
ROS2书籍7.3.3章节运行navigation.launch.py后报错找不到map
-
@onedream 好的,地图如下:
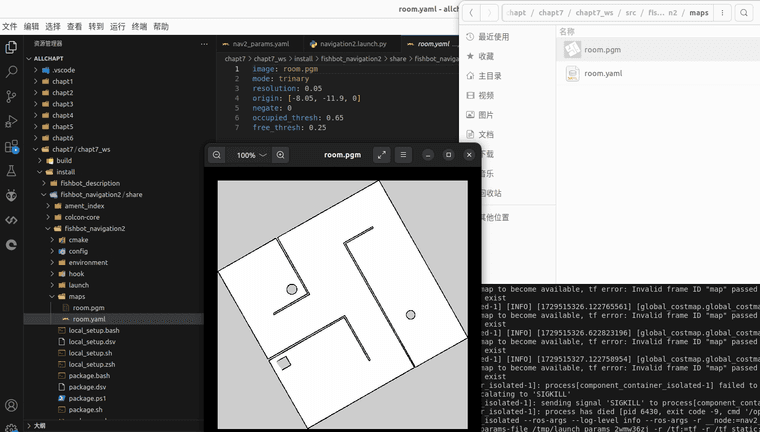
我昨天尝试单独在rviz2中打开该地图也没有成功,前面的章节包括7.3.3前面的小节都是顺利通过的。
-
@onedream 在 ROS2书籍7.3.3章节运行navigation.launch.py后报错找不到map 中说:
Activating
我的意思是你单独启动地图服务节点发出地图来看看,不要启动整个导航包。刚才看了下你发的日志,你没有给机器人设置初始姿态吗,就是在rviz2上点那个intial_pose
-
@2438413171 2D Pose Estimate
-
@onedream 是的,就是rviz2中没有地图所以我没法点2D Pose Estimate;
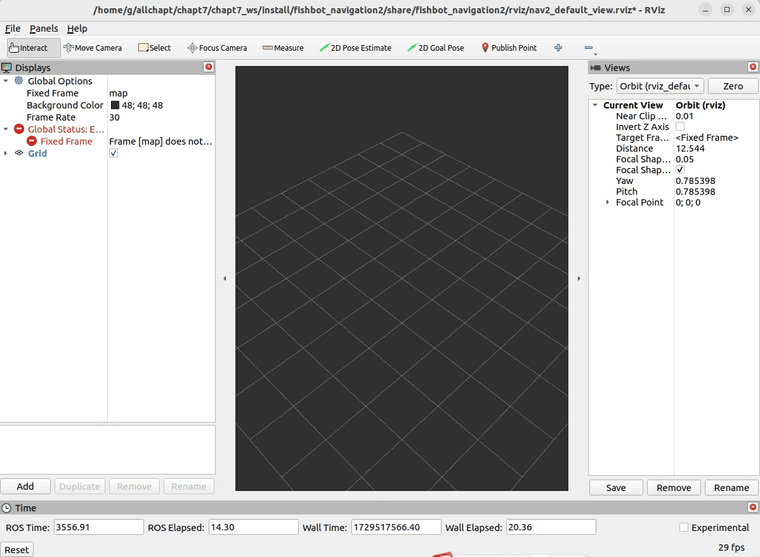
然后我在昨天尝试加入topic--map也是报错
单独启动地图节点我昨天也想到了,但是找了半天不知道是哪个命令了
-
@2438413171 在 ROS2书籍7.3.3章节运行navigation.launch.py后报错找不到map 中说:
@onedream 在 ROS2书籍7.3.3章节运行navigation.launch.py后报错找不到map 中说:
Activating
我的意思是你单独启动地图服务节点发出地图来看看,不要启动整个导航包。刚才看了下你发的日志,你没有给机器人设置初始姿态吗,就是在rviz2上点那个intial_pose
没有地图也点几下那个按钮,有时候是因为没有初始姿态这个原因的,你也可以试试在配置文件中事先随便给一个初始姿态,我还遇到过rviz2必须先提前打开订阅地图话题再运行程序才可以看到地图,多试试把。提前给定初始姿态你可以在配置文件amcl下面加入这段话:
set_initial_pose: true
always_reset_initial_pose: false
initial_pose:
x: 0.0189337
y: 0.00899811
z: 0.0
yaw: 0.011236 -
@onedream 单独启动地图你可以网上找个教程看看,很多的,一步一步排除问题
-
@2438413171 好的,感谢大佬,感谢指导,我先按照你的方法去做。那个单独启动的暂不管他,不行了我在去找。
-
@onedream 在 ROS2书籍7.3.3章节运行navigation.launch.py后报错找不到map 中说:
rviz_config_dir
应该是没有初始化位姿态导致的,另外就是先启动Gazebo仿真程序才行,不知道你启动了没。
不急就再等等,这周就讲到第七章了
-
@小鱼 要的,小鱼老师,谢谢了,最终确定就是没有初始化。我不和二极管说话大佬指导的是对的没有地图也可以去初始化。感谢感谢。
-
@onedream 解决了你不告诉我,让我开心开心哈哈哈哈
-
@2438413171 深感抱歉,下次一定第一时间告诉你,感谢感谢。