gmapping 建图错误,odom 到 map的tf变换异常,求助!
-
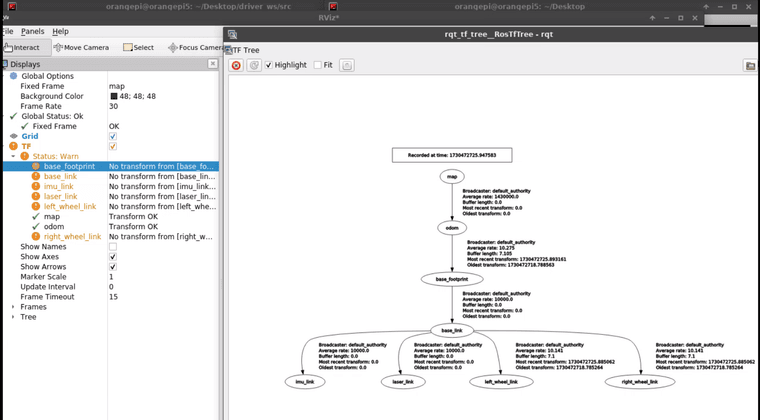
1.tf树看结构正常,但是rviz2中显示转换失败
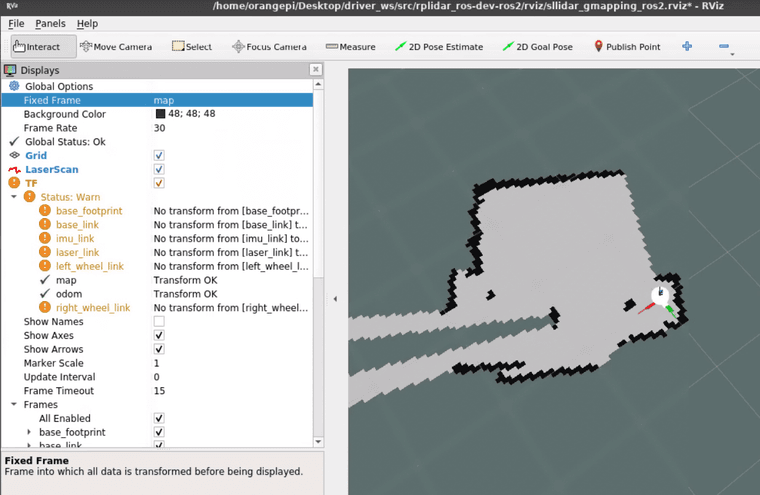
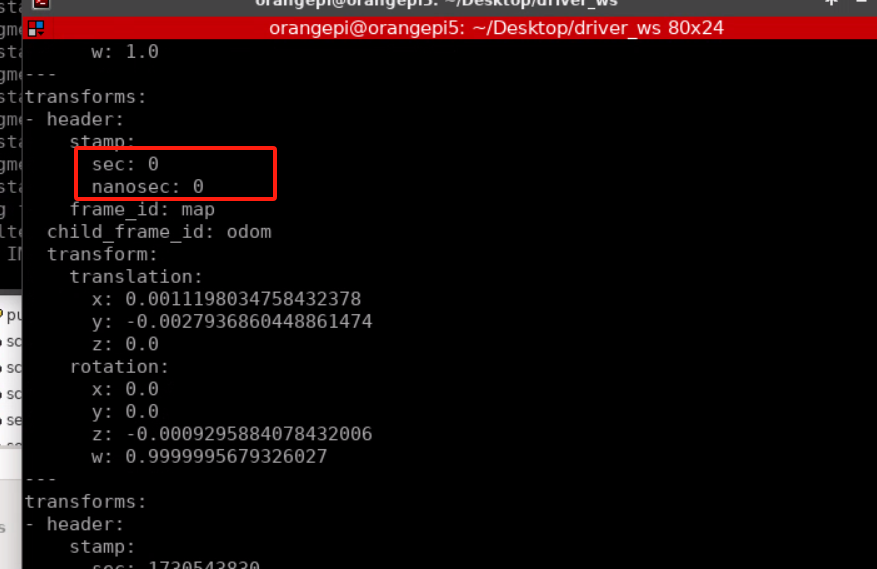
2.查了一下,odom到map的变化时间戳是0,确实有问题,但是没排查到具体问题的所在有没有小伙伴可以提供一下思路,不知道怎么排查
-
在使用gmapping进行SLAM建图时,遇到odom到map的tf变换异常通常与多种因素有关,包括时间戳问题、数据同步问题、配置错误等。以下是一些详细的排查步骤和建议,希望能够帮助你解决问题:
1. 检查时间戳问题
你提到odom到map的变换时间戳为0,这是一个明显的异常。通常,这意味着相关的传感器数据或里程计数据在传递过程中丢失了时间戳信息。
-
检查数据源:
- 确认里程计(odom)数据是否正确地带有时间戳。这通常来自你的机器人底盘或轮式编码器。
- 使用
rostopic echo /odom查看里程计消息,确认其中的header.stamp字段是否非零且合理。
-
检查tf发布:
- 使用
rostopic echo /tf或tf_echo /odom /map来查看tf变换,并检查时间戳是否一致或合理。 - 如果
/odom到/map的tf变换时间戳为0,这通常意味着gmapping在尝试创建这个变换时遇到了问题。
- 使用
2. 检查数据同步
在ROS中,数据的同步非常重要,尤其是在进行SLAM时。
-
确保所有相关节点都在使用正确的时间:
- 检查ROS master是否设置了正确的时间源(如果使用NTP服务器,确保所有节点都能同步时间)。
- 使用
rosparam get /use_sim_time查看是否启用了模拟时间。如果你的环境是真实的,这个参数应该设置为false。
-
检查数据发布和订阅的节点:
- 确保所有发布和订阅相关数据的节点都在运行,并且没有崩溃或挂起。
- 使用
rosnode list和rosnode info <node_name>来检查节点的状态。
3. 检查gmapping的配置
gmapping的配置文件(通常是YAML格式)可能包含影响tf变换的参数。
-
检查配置文件:
- 确认
odom_frame_id和base_frame_id是否设置正确。 - 查看
frequency、map_update_interval等参数,确保它们与你的系统性能相匹配。
- 确认
-
尝试调整参数:
- 有时增加
odom_alpha(里程计噪声)和减少laser_z_hit(激光击中时的测量噪声)可以帮助gmapping更好地处理噪声数据。
- 有时增加
4. 使用调试工具
-
Rviz中的调试:
- 在Rviz中,确保添加了
TF显示工具,这可以帮助你直观地看到tf变换的问题。 - 使用
Add->By topic->Odometry和Add->By display type->TF来查看和调试tf问题。
- 在Rviz中,确保添加了
-
日志和调试输出:
- 增加ROS的日志级别,查看gmapping和相关节点的输出,可能会有有用的错误信息。
- 使用
roslaunch --screen your_launch_file.launch来运行你的launch文件,这样你可以在终端中看到更多的输出信息。
5. 检查硬件和物理环境
- 确保所有传感器(如激光雷达)都正常工作,并且没有被遮挡。
- 检查机器人的移动是否平稳,没有异常震动或打滑。
6. 寻求社区帮助
如果以上步骤都不能解决问题,可以考虑在ROS社区、Stack Overflow或GitHub等平台寻求帮助,提供详细的问题描述、配置文件和日志输出,这样其他用户或开发者可能更容易帮助你找到问题所在。
希望这些步骤能帮助你解决gmapping建图时的tf变换异常问题!
以上为生成回答,仅供参考~
-