在“启动bringup”这一步中,运行“ros2 launch fishbot_bringup fishbot_bringup.launch.py”报错
-
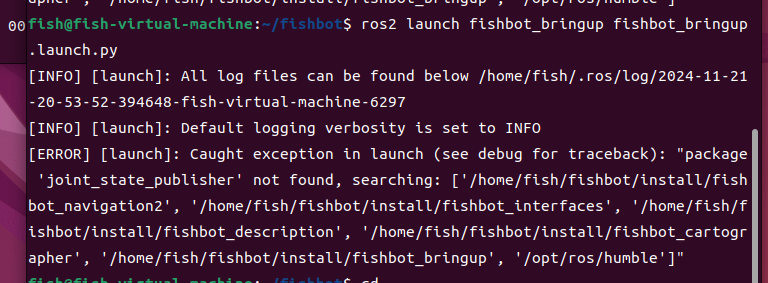
报错:[INFO] [launch]: All log files can be found below /home/fish/.ros/log/2024-11-21-20-53-52-394648-fish-virtual-machine-6297
[INFO] [launch]: Default logging verbosity is set to INFO
[ERROR] [launch]: Caught exception in launch (see debug for traceback): "package 'joint_state_publisher' not found, searching: ['/home/fish/fishbot/install/fishbot_navigation2', '/home/fish/fishbot/install/fishbot_interfaces', '/home/fish/fishbot/install/fishbot_description', '/home/fish/fishbot/install/fishbot_cartographer', '/home/fish/fishbot/install/fishbot_bringup', '/opt/ros/humble']" -
@小鱼 麻烦有空帮我看看,就差这一步了,谢谢大佬
-
从您提供的错误信息来看,问题出在 ROS 2 的
launch文件试图找到一个名为joint_state_publisher的包,但是在指定的路径中未能找到这个包。joint_state_publisher是一个常见的 ROS 包,用于发布关节状态信息,通常用于机器人模拟和真实机器人控制中。要解决这个问题,您可以采取以下几个步骤:
-
确认是否安装了
robot_state_publisher包:
注意,在 ROS 2 中,joint_state_publisher已经被重命名为robot_state_publisher。首先,您需要确认是否已经安装了robot_state_publisher包。在 ROS 2 Humble Hawksbill 中,您可以通过以下命令安装它(如果尚未安装):sudo apt install ros-humble-robot-state-publisher如果您使用的是其他 ROS 2 发行版,请将
humble替换为相应的发行版名称。 -
检查
launch文件:
打开fishbot_bringup.launch.py文件,检查是否有引用到joint_state_publisher的地方。如果有,您应该将其更改为robot_state_publisher,或者确保launch文件中正确引用了包含robot_state_publisher的包。 -
确保环境变量设置正确:
确保您的 ROS 2 工作空间的环境变量(如ROS_PACKAGE_PATH)设置正确,包含了所有相关的包。您可以通过以下命令来查看当前的ROS_PACKAGE_PATH:echo $ROS_PACKAGE_PATH确保这个路径包含了
robot_state_publisher包的安装位置。 -
重新编译和源工作空间:
如果您刚刚安装了新的包或修改了launch文件,确保重新编译您的工作空间并源入新的设置:cd /path/to/your/workspace colcon build source install/setup.bash -
运行
launch文件:
再次尝试运行您的launch文件,看是否还会出现相同的错误。
如果以上步骤仍然无法解决问题,您可能需要检查您的
launch文件和 ROS 2 工作空间的配置,确保所有依赖项都已正确安装和配置。
以上为生成回答,仅供参考~
-
-
@XR_ROS sudo apt install ros-humble-robot-state-publisher
-
@小鱼
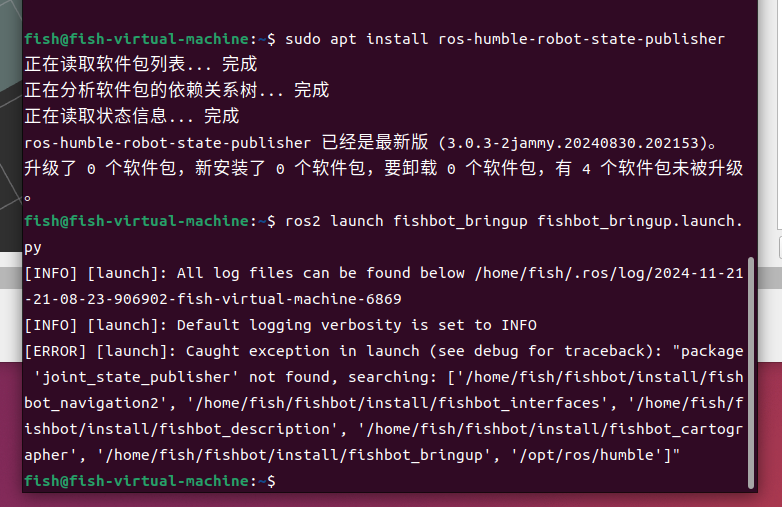
依然如此 -
@XR_ROS sudo apt install ros-humble-joint-state-publisher
https://fishros.org.cn/forum/topic/151/提问前必看-不符合要求的问题拒绝回答
后面提问最好不要截图
-
@小鱼 好的谢谢,知道了