moveit的ompl选不了算法
-
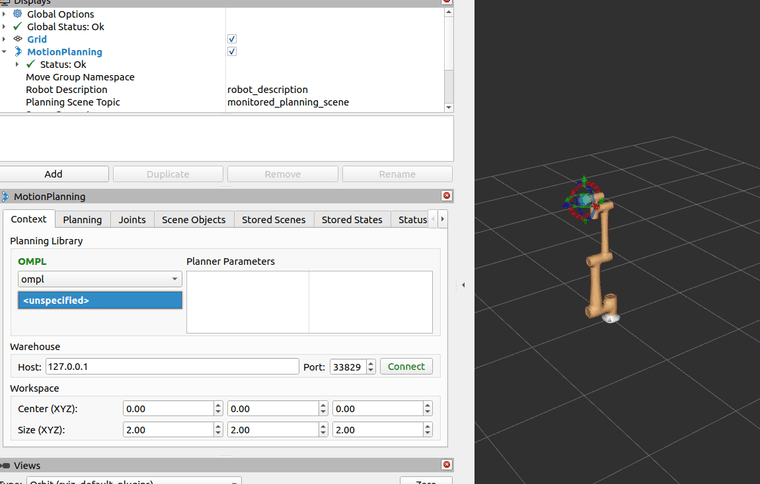
如图我是用moveit助手建立的包,运行demo之后在ompl里没有算法可以选,请问大神们要怎么解决?
-
针对MoveIt的OMPL无法选择算法的问题,这通常与MoveIt的配置、OMPL的安装与集成以及ROS(机器人操作系统)的环境设置有关。以下是一些可能的解决步骤和建议:
-
检查MoveIt和OMPL的安装:
- 确保MoveIt和OMPL都已正确安装在你的ROS环境中。
- 如果你是从源代码安装的MoveIt和OMPL,请确保所有依赖项都已满足,并且编译过程中没有出现错误。
-
检查MoveIt的配置:
- 在MoveIt的配置文件中,确保已经启用了OMPL规划器。
- 检查
moveit_config包中的planning.yaml文件,确保OMPL相关的配置是正确的。
-
重新编译MoveIt工作空间:
- 有时候,重新编译整个MoveIt工作空间可以解决一些集成问题。
- 在MoveIt工作空间的根目录下,运行
catkin clean命令清除旧的编译文件,然后运行catkin build重新编译。
-
检查ROS环境变量:
- 确保你的ROS环境变量(如
ROS_PACKAGE_PATH)已正确设置,以便ROS能够找到所有必要的包。
- 确保你的ROS环境变量(如
-
查看MoveIt日志:
- 运行MoveIt demo时,查看ROS控制台输出的日志信息,可能会有关于OMPL算法无法加载的提示或错误信息。
-
尝试手动指定OMPL算法:
- 在MoveIt的规划中,有时可以通过编程方式手动指定要使用的OMPL算法。
- 查阅MoveIt的文档,了解如何通过代码设置OMPL的规划算法。
-
检查OMPL算法的实现:
- 如果你尝试添加自定义的OMPL算法,请确保算法的实现是正确的,并且已经正确集成到MoveIt中。
- 自定义算法需要遵循OMPL的API,并且需要在MoveIt的OMPL接口中正确注册。
-
查看社区和论坛:
- 访问ROS和MoveIt的社区论坛,看看是否有其他人遇到了类似的问题,并找到了解决方案。
-
更新和升级:
- 确保你的ROS、MoveIt和OMPL都是最新版本。有时候,软件更新会修复一些已知的问题。
如果以上步骤都无法解决问题,你可能需要更深入地调查MoveIt和OMPL的集成方式,或者考虑寻求来自ROS社区或MoveIt开发者的专业帮助。
以上为生成回答,仅供参考~
-