rviz2不显示robotmodel
-
我在GitHub上下了一个Stewart(六连杆并联机构)的模型,首先对urdf生成了位置关系pdf,如下图:
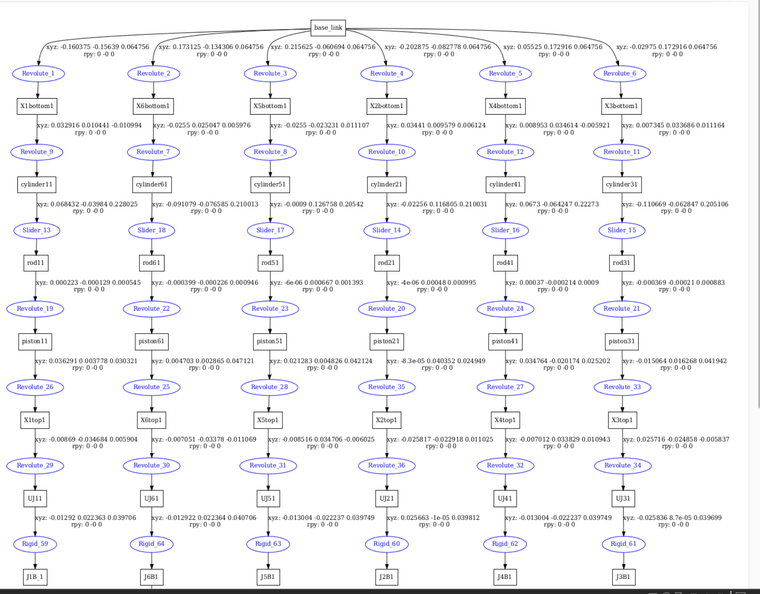
由于urdf文件代码量过于庞大不方便展示,后续启动了rviz2,添加了robotmodel,将description改为file并导入了urdf文件,但一直未显示模型。
所以是我的操作有问题还是由于模型数据过于庞大? -
在RViz2中不显示RobotModel可能是由于多种原因导致的,不仅仅是操作问题或模型数据过于庞大。以下是一些可能的原因及其相应的解决方案:
-
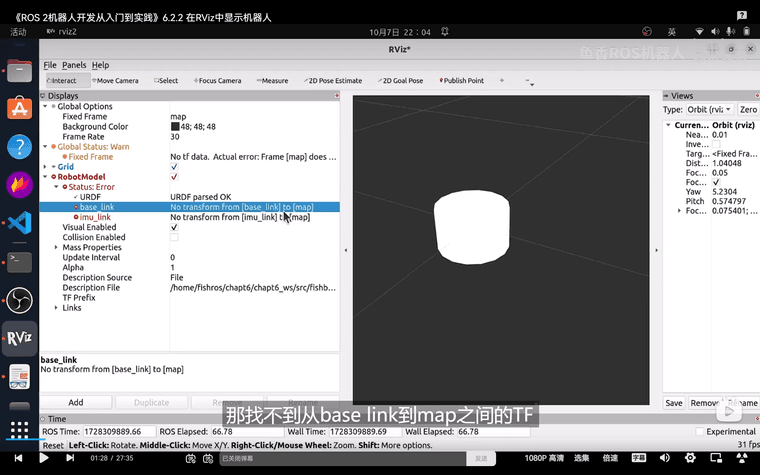
Fixed Frame设置问题:
- 在RViz2界面左上角,检查Fixed Frame的设置。如果设置为非base_link或map等常用坐标系,可能会导致模型无法显示。尝试将Fixed Frame改为base_link或相关坐标系,看是否能显示模型。
-
TF变换问题:
- 确保你的机器人模型中所有的坐标系都已经发布,并且tf树中的关系正确。使用
rostopic echo /tf命令可以查看tf树的结构,确保从base_link到map或其他相关坐标系的变换关系存在。 - 如果缺少某些变换关系,可以使用
rosrun tf static_transform_publisher命令手动添加静态变换。
- 确保你的机器人模型中所有的坐标系都已经发布,并且tf树中的关系正确。使用
-
URDF文件问题:
- 虽然你提到URDF文件代码量庞大,但还是要确保URDF文件没有语法错误或遗漏的组件。使用文本编辑器仔细检查URDF文件,确保所有引用的文件和路径都是正确的。
- 确保URDF文件已经正确放置在ROS的工作空间中,并且已经编译生成了相应的描述文件。
-
RViz2配置问题:
- 在RViz2中,确保你已经添加了正确的显示项,并且设置了正确的颜色和大小。检查视图中的相机位置和朝向,确保模型在相机视野内。
- 尝试重新添加RobotModel显示项,看是否能解决问题。
-
环境变量问题:
- 在某些情况下,系统环境变量可能会影响RViz2的显示。例如,如果LC_NUMERIC环境变量设置为非en_US.UTF-8,可能会导致渲染问题。尝试将LC_NUMERIC环境变量改为en_US.UTF-8,然后重新启动RViz2。
-
资源限制问题:
- 如果模型数据确实非常庞大,可能会超出RViz2的渲染能力。尝试简化模型或使用更高性能的计算机来运行RViz2。
-
查看日志文件:
- RViz2会生成日志文件,记录运行过程中的错误和警告信息。查看这些日志文件,可能会找到导致模型无法显示的具体原因。
-
更新和重启:
- 尝试更新你的ROS版本和RViz2软件,或者重启你的计算机和仿真工具,看是否能解决问题。
综上所述,建议按照上述步骤逐一排查问题,并尝试相应的解决方案。如果问题仍未解决,可以在ROS的官方论坛、Q&A网站或相关的GitHub仓库中提问,寻求社区的帮助。在提问时,尽量提供详细的错误信息和相关代码,以便他人更好地理解你的问题并提供帮助。
以上为生成回答,仅供参考~
-
-
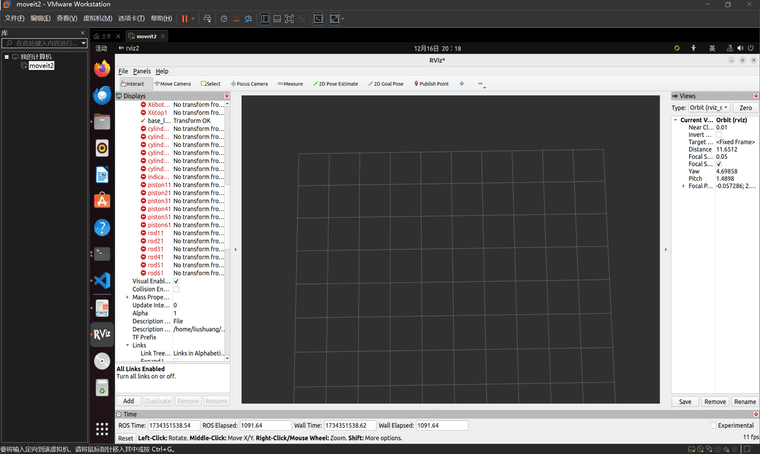
我的想法是像小鱼这样先将urdf文件导入看看,但是我的urdf导入好像报错了

不知道这个错误如何解决 -
应该是我的mesh文件没配置好
-
@ls3470319318 文件贴出来看看
-
@小鱼 这是部分urdf文件
<?xml version="1.0" ?> <robot name="Stewart"> <material name="silver"> <color rgba="0.700 0.700 0.700 1.000"/> </material> <link name="base_link"> <inertial> <origin xyz="2.3255899752716172e-11 -1.1937183962455178e-11 0.013288962255547656" rpy="0 0 0"/> <mass value="13.757667475145922"/> <inertia ixx="0.21797416015774124" iyy="0.2179741700510937" izz="0.4340771179526647" ixy="3.067776560401459e-11" iyz="4.670150176529436e-12" ixz="-8.804667573970036e-12"/> </inertial> <visual> <origin xyz="0 0 0" rpy="0 0 0"/> <geometry> <mesh filename="package://stewart_description/meshes/base_link.stl" scale="0.001 0.001 0.001"/> </geometry> <material name="silver"/> <material/> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0"/> <geometry> <mesh filename="package://stewart_description/meshes/base_link.stl" scale="0.001 0.001 0.001"/> </geometry> </collision> </link> <link name="X1bottom1"> <inertial> <origin xyz="0.012750034781542574 0.022083926967425505 -4.07240130076425e-07" rpy="0 0 0"/> <mass value="0.015369342112821462"/> <inertia ixx="2.084365263984602e-06" iyy="1.9211221879191767e-06" izz="3.3040955648304437e-06" ixy="-1.4137265086372345e-07" iyz="-3.4574917186284927e-07" ixz="5.988551323401657e-07"/> </inertial> <visual> <origin xyz="0.160375 0.15639 -0.064756" rpy="0 0 0"/> <geometry> <mesh filename="package://stewart_description/meshes/X1bottom1.stl" scale="0.001 0.001 0.001"/> </geometry> <material name="silver"/> <material/> </visual> <collision> <origin xyz="0.160375 0.15639 -0.064756" rpy="0 0 0"/> <geometry> <mesh filename="package://stewart_description/meshes/X1bottom1.stl" scale="0.001 0.001 0.001"/> </geometry> </collision> </link> <link name="X6bottom1"> <inertial> <origin xyz="-0.025500046262033477 -6.64043929288205e-08 -4.0724012435877643e-07" rpy="0 0 0"/> <mass value="0.015369342112821437"/> <inertia ixx="1.8395006492809914e-06" iyy="1.9359846193172324e-06" izz="3.534097746554256e-06" ixy="-1.5720931501039814e-18" iyz="-4.0435313273422735e-07" ixz="6.505213034913027e-19"/> </inertial> <visual> <origin xyz="-0.173125 0.134306 -0.064756" rpy="0 0 0"/> <geometry> <mesh filename="package://stewart_description/meshes/X6bottom1.stl" scale="0.001 0.001 0.001"/> </geometry> <material name="silver"/> <material/> </visual> <collision> <origin xyz="-0.173125 0.134306 -0.064756" rpy="0 0 0"/> <geometry> <mesh filename="package://stewart_description/meshes/X6bottom1.stl" scale="0.001 0.001 0.001"/> </geometry> </collision> </link>在导入urdf文件后终端会报很多这样的错误
[ERROR] [1734361100.623573101] [rviz2]: Error retrieving file [meshes/J1B_1.stl]: Could not resolve host: meshes -
@ls3470319318 joint呢?