windows11 wsl ubuntu 22.04 运行小乌龟报错了( ros2 run turtlesim turtle_teleop_key)
-
按照鱼总教程:https://www.bilibili.com/video/BV1QarYYsEnE/?spm_id_from=333.1391.0.0&vd_source=852624e0ab8ceaa87df43844b645ef79 全部安装完毕。
ros2 run turtlesim turtlesim_node 直接显示小乌龟正常。重点来了:
运行下面一直卡住无任何显示了:
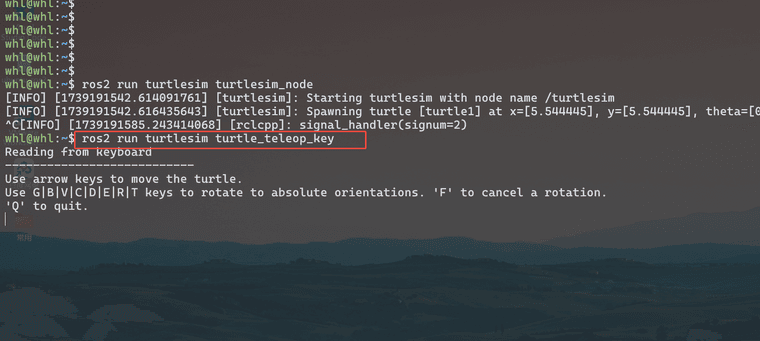
ros2 run turtlesim turtle_teleop_key
各位大佬给看看吧,已经阻塞2小时,发呆发呆发呆 -
当你在 Windows 11 的 WSL (Windows Subsystem for Linux) Ubuntu 22.04 上运行 ROS 2 (Robot Operating System 2) 的
turtle_teleop_key节点时遇到卡住的问题,可能是由几个不同的因素引起的。以下是一些可能的原因和相应的解决方案:-
终端输入焦点问题:
turtle_teleop_key节点依赖于键盘输入来控制乌龟的移动。如果终端窗口没有焦点(即当前活动窗口不是运行turtle_teleop_key的终端),它可能无法接收键盘输入。- 解决方案:确保运行
turtle_teleop_key的终端窗口是当前活动窗口,并且没有其他窗口或应用占用键盘焦点。
-
键盘布局或输入法问题:
- 如果你的键盘布局或输入法设置与预期的不同,可能会导致
turtle_teleop_key无法正确识别输入命令。 - 解决方案:检查并确保你的键盘布局和输入法设置正确,或者尝试切换到默认的英文输入法。
- 如果你的键盘布局或输入法设置与预期的不同,可能会导致
-
资源或权限问题:
- 在 WSL 中运行 ROS 2 时,可能会遇到资源限制或权限问题,这可能会影响节点的正常运行。
- 解决方案:确保你的 WSL 实例有足够的资源(如内存和CPU),并且你有足够的权限来运行 ROS 2 节点。
-
ROS 2 或依赖项问题:
- 如果 ROS 2 或其依赖项没有正确安装或配置,可能会导致节点无法正常运行。
- 解决方案:重新检查你的 ROS 2 安装和配置,确保所有依赖项都已正确安装。
-
终端模拟问题:
- WSL 中的终端模拟器可能与 ROS 2 的某些功能不完全兼容。
- 解决方案:尝试使用不同的终端模拟器,如 Windows Terminal 或 GNOME Terminal(如果你使用的是图形界面的 WSLg)。
-
调试和日志:
- 如果以上方法都没有解决问题,你可以尝试查看 ROS 2 的日志输出,以获取更多关于问题的信息。
- 解决方案:运行
ros2 node list和ros2 topic list来查看活动的节点和主题,或者使用ros2 node info /turtle_teleop_key来获取关于该节点的更多信息。此外,你也可以尝试在另一个终端窗口中运行ros2 topic echo /turtle1/cmd_vel geometry_msgs/msg/Twist来查看是否有任何消息被发布。
如果以上方法仍然无法解决问题,你可能需要更详细地检查你的系统配置或寻求来自 ROS 2 社区的帮助。
以上为生成回答,仅供参考~
-
-
@mahong1237 这个本来就没有显示的
-
自问自答来了,原来要先运行:ros2 run turtlesim turtlesim_node。这个命令用来显示一个小乌龟。
ros2 run turtlesim turtlesim_node 这个命令是一个控制命令,运行这个命令后,就可以控制小乌龟了。