8.2.4Nav2中位置初始化失败
-
主要问题
在运行
$ ros2 launch fishbot_description gazebo_sim.launch.py与$ ros2 launch fishbot_navigation2 navigation2.launch.py后,在Nav2中使用2D Pose Estimate进行位置初始化却没有反应.代码使用书中源码
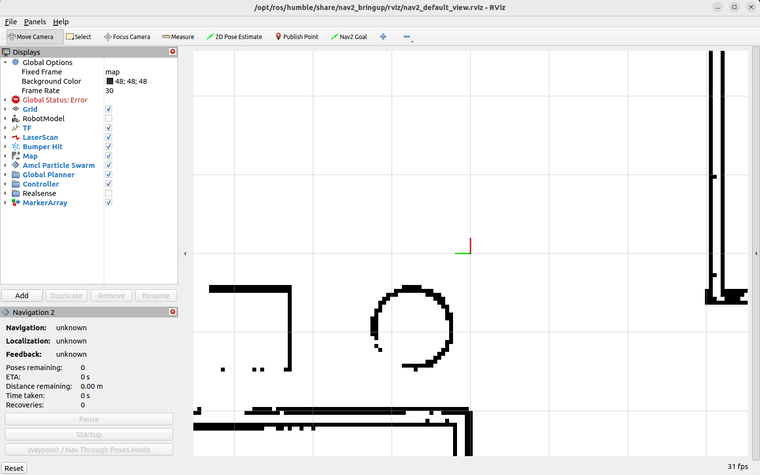
具体信息
报错内容:
[rviz2-2] [INFO] [1741239804.218106393] [rviz2]: Message Filter dropping message: frame 'odom' at time 1448.795 for reason 'discarding message because the queue is full' [component_container_isolated-1] [INFO] [1741239804.270139737] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist [rviz2-2] [INFO] [1741239804.442806621] [rviz2]: Message Filter dropping message: frame 'odom' at time 1448.995 for reason 'discarding message because the queue is full' [rviz2-2] [INFO] [1741239804.647028227] [rviz2]: Setting estimate pose: Frame:map, Position(-0.00625003, 0.015625, 0), Orientation(0, 0, -0.0073542, 0.999973) = Angle: -0.0147085 [component_container_isolated-1] [INFO] [1741239804.647405258] [amcl]: initialPoseReceived [component_container_isolated-1] [INFO] [1741239804.647525437] [amcl]: Setting pose (1451.138000): -0.006 0.016 -0.015 [component_container_isolated-1] [INFO] [1741239804.770150840] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist [rviz2-2] [INFO] [1741239804.826190716] [rviz2]: Message Filter dropping message: frame 'odom' at time 1449.395 for reason 'discarding message because the queue is full'节点列表
$ ros2 node list /amcl /behavior_server /bt_navigator /bt_navigator_navigate_through_poses_rclcpp_node /bt_navigator_navigate_to_pose_rclcpp_node /controller_manager /controller_server /depth_camera /fishbot_diff_drive_controller /fishbot_joint_state_broadcaster /gazebo /gazebo_ros2_control /global_costmap/global_costmap /imu_plugin /laserscan /launch_ros_49116 /lifecycle_manager_localization /lifecycle_manager_navigation /local_costmap/local_costmap /map_server /nav2_container /planner_server /robot_state_publisher /rviz2 /rviz_navigation_dialog_action_client /smoother_server /transform_listener_impl_5f458c66f6a0 /transform_listener_impl_7b36ac001e70 /transform_listener_impl_7b36b8001e70 /transform_listener_impl_7b36c8001e70 /transform_listener_impl_7b36d4001e90 /transform_listener_impl_7b370c0024a0 /velocity_smoother /waypoint_followertf_tree:
尝试运行
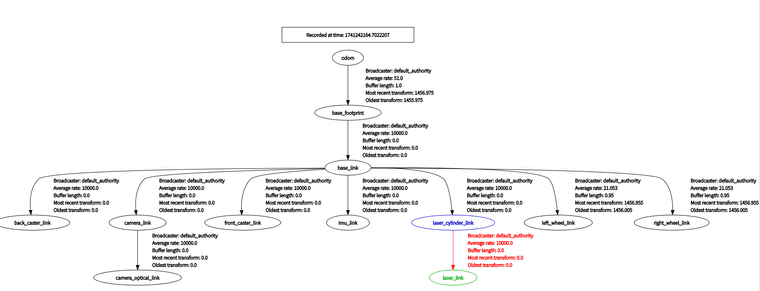
$ ros2 run tf2_ros tf2_echo map odom的结果:[INFO] [1741241283.638348664] [tf2_echo]: Waiting for transform map -> odom: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist [INFO] [1741241285.627289037] [tf2_echo]: Waiting for transform map -> odom: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist -
从你提供的日志和错误信息来看,主要问题在于Nav2(导航2)系统中缺少必要的坐标变换(tf变换),尤其是从
base_link到map的变换,以及map到odom的变换。这些问题通常是由于以下几个原因造成的:-
地图服务器(map_server)未正确发布
map坐标系:- 确保
map_server节点正在运行,并且已经加载了正确的地图文件。 - 检查
map_server的启动参数,确保它发布了map坐标系。
- 确保
-
里程计(Odometry)信息未正确发布:
- 确保你的机器人正在发布里程计信息,通常这是通过
robot_state_publisher和相关的控制器(如fishbot_diff_drive_controller)完成的。 - 检查是否有其他节点(如
gazebo或amcl)也依赖于里程计信息,并确保它们能够接收到。
- 确保你的机器人正在发布里程计信息,通常这是通过
-
tf变换缺失:
- 从错误信息来看,
map到odom的变换不存在。这通常意味着amcl(自适应蒙特卡洛定位)或类似的定位节点没有正确运行或配置。 - 使用
tf2_ros tf2_echo命令检查其他相关的tf变换,如从base_link到odom。
- 从错误信息来看,
-
Rviz配置问题:
- 确保在Rviz中正确设置了固定帧(Fixed Frame),通常这应该设置为
map。 - 检查Rviz中的TF显示,确保所有必要的变换都在更新。
- 确保在Rviz中正确设置了固定帧(Fixed Frame),通常这应该设置为
-
启动文件配置:
- 检查
gazebo_sim.launch.py和navigation2.launch.py启动文件,确保所有必要的节点都被正确启动,并且参数配置正确。
- 检查
解决步骤:
-
验证地图服务器:
- 确保
map_server节点正在运行,并且已经加载了地图。
- 确保
-
检查里程计信息:
- 使用
ros2 topic echo /odom(或相应的里程计话题)来检查里程计数据是否正在被发布。
- 使用
-
检查tf变换:
- 使用
ros2 run tf2_ros tf2_echo /base_link /odom和ros2 run tf2_ros tf2_echo /map /odom来检查这些变换是否存在。
- 使用
-
重新启动和调试:
- 重新启动所有相关的节点,并密切关注控制台输出,看是否有任何错误或警告信息。
- 如果问题依旧存在,尝试简化配置,逐步添加组件以确定是哪个部分出现了问题。
-
查阅文档和社区资源:
- 查阅ROS 2和Nav2的官方文档,以及相关的社区论坛和问答网站,看看是否有其他人遇到了类似的问题。
通过这些步骤,你应该能够诊断并解决Nav2中位置初始化失败的问题。
以上为生成回答,仅供参考~
-
-
已解决,报错原因:没有及时更新第七章的代码,修改
gazebo_sensor_plugin.xacro文件
