在跟着视频运行chapt7配套代码的时候,没有map坐标系
-
背景:
chapt7的第一步,用slam_toolbox建图
问题描述:
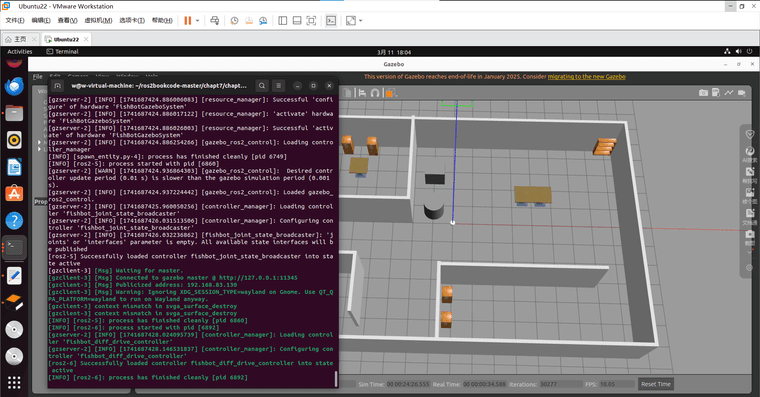
能够打开仿真,应该没有报错。
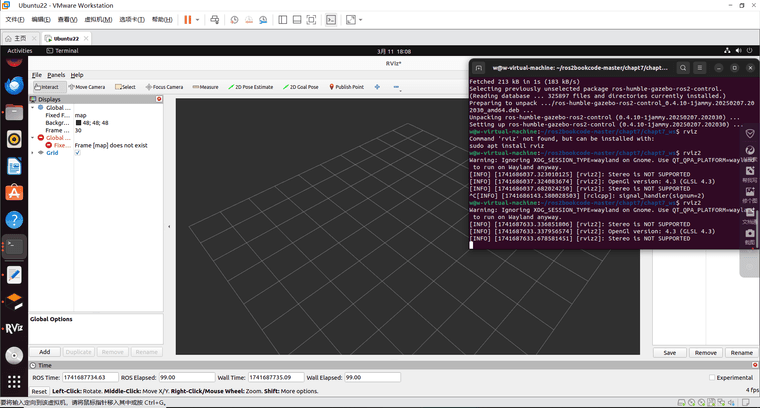
但是打开rviz2后,报错map不存在。

发现确实没有map坐标系。

有map话题,但没有数据发送
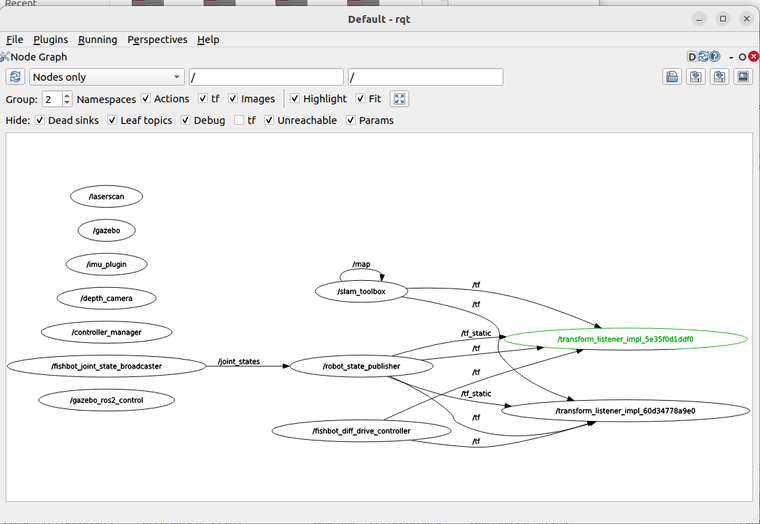
rqt如上具体细节和上下文:
没有进行别的配置,仅仅build了chapt7的代码,然后运行仿真、slam、rviz2。不知道是不是要配置别的东西?我看了gazebo_sim.launch.py中的路径都是自动获取的
-
当你在使用
slam_toolbox进行建图时,如果遇到了map坐标系不存在或map话题没有数据发送的问题,可能是由于以下几个原因导致的。以下是一些排查和解决步骤,希望能帮助你解决问题:-
检查 SLAM 节点是否正常运行:
- 确保 SLAM 节点(如
cartographer_ros或slam_toolbox的相应节点)已经正确启动,并且没有报错。 - 你可以使用
ros2 node list查看所有活动的节点,确认 SLAM 节点是否在运行。 - 使用
ros2 topic list查看所有主题,确认是否有/map和/odom等相关主题。
- 确保 SLAM 节点(如
-
检查 TF 变换:
- 使用
ros2 tf static_list或ros2 tf tree命令查看当前的 TF 树,确认是否有从map到odom,再到base_link或base_footprint的变换。 - 如果 TF 树不完整,可能是 SLAM 节点没有正确发布变换。
- 使用
-
检查 RViz 配置:
- 在 RViz 中,确保你已经添加了
Map显示类型,并且选择了正确的map框架。 - 检查
Global Options中的Fixed Frame是否设置为map。
- 在 RViz 中,确保你已经添加了
-
检查仿真环境配置:
- 确认
gazebo_sim.launch.py中的路径和参数是否正确,特别是关于 SLAM 和地图的部分。 - 如果 SLAM 需要特定的传感器数据(如激光扫描或深度相机),确保这些数据正在被正确发布并且 SLAM 节点能够接收到。
- 确认
-
检查日志文件:
- 查看 SLAM 节点的日志文件,通常可以通过
ros2 node info <node_name>获取日志文件的路径。 - 日志文件中可能包含关于为什么
map话题没有数据或 SLAM 失败的具体错误信息。
- 查看 SLAM 节点的日志文件,通常可以通过
-
重新构建和部署:
- 有时候,简单的重新构建整个工作空间(
colcon build)和重新部署(确保所有依赖项都是最新的)可以解决问题。 - 确保你的工作空间是干净的,没有旧的或损坏的构建文件。
- 有时候,简单的重新构建整个工作空间(
-
检查依赖关系:
- 确保所有依赖的软件包都已正确安装,并且版本兼容。
- 对于
slam_toolbox,检查是否所有必要的依赖项都已安装,如robot_localization、tf2_ros等。
如果以上步骤都不能解决问题,你可能需要更详细地检查 SLAM 节点的配置或寻求社区的帮助,比如在 ROS 2 的官方论坛或 GitHub 仓库中提问。
以上为生成回答,仅供参考~
-
-
@3262269395 先检查各个主体的数据是否正常