fishbot上有IMU模块,但是第九章最后的小车代码没有IMU部分,想知道这部分代码如何编写
-
@小鱼
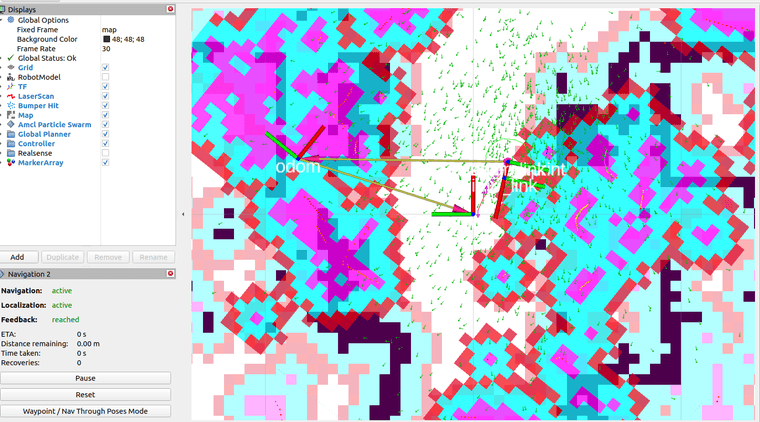
大佬,启用了robot_localization之后启动导航,但是odom的漂移还是非常明显,这是正常的吗?有什么办法减小这种漂移吗? -
@1257261547 看起来像是地图问题,有点乱,检查检查雷达和网络连接,fishbot的里程计本身还是蛮稳定的
@小鱼
大佬,启用了robot_localization之后启动导航,但是odom的漂移还是非常明显,这是正常的吗?有什么办法减小这种漂移吗?
@1257261547 看起来像是地图问题,有点乱,检查检查雷达和网络连接,fishbot的里程计本身还是蛮稳定的