Your browser does not seem to support JavaScript. As a result, your viewing experience will be diminished, and you have been placed in read-only mode.
Please download a browser that supports JavaScript, or enable it if it's disabled (i.e. NoScript).
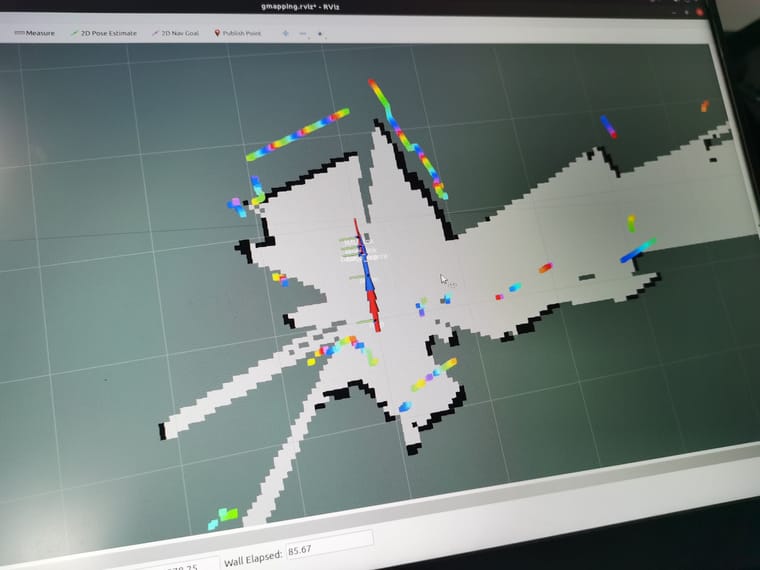
使用Gmapping建图时 一段时间(15s左右)所有的坐标点都会往前飞,导致建图出现问题,具体如图所示。所有传感器正常。
@追逐我的明天 话题中没有odom的发布 编码器亮灯,不知道是什么问题
@追逐我的明天 可能是odom问题,需要进一步的排查,另外编码器亮灯不代表一定有里程计数据,中间还要经过很多步的处理。
@小鱼 在里程计和IMU的数据融合中能找到imu_odom的话题信息