STM32系列MICROROS环境配置(更新 使用cmake管理)
-
更新:更加自由的构建STM32 Microros静态库的方法(适用于linux X86 arm64本文只讲述x86,arm64流程一致,不过需要将arm64系统中的编译器补全部分库即可)
一.使用 micro_ros_setup 生成Microros静态链接库
Ubuntu x86环境:前提 ,需要下载交叉编译器,若已安装可以跳过
sudo apt-get install -y gcc-arm-none-eabi下面为从创建工作空间到生成静态库的所有命令,一步一步运行即可:
source /opt/ros/$ROS_DISTRO/setup.bash mkdir uros_ws && cd uros_ws git clone -b $ROS_DISTRO https://github.com/micro-ROS/micro_ros_setup.git src/micro_ros_setup #若不能使用rosdep,可以使用rosdepc rosdep update && rosdep install --from-paths src --ignore-src -y colcon build source install/local_setup.bash ros2 run micro_ros_setup create_firmware_ws.sh generate_lib generic
到此,基础构建完成目录如上图所示,但还需要配置两个配置文件 toolchain.cmake和colcon.meta才能生成静态链接库
toolchain.cmake配置如下set(CMAKE_SYSTEM_NAME Generic) set(CMAKE_CROSSCOMPILING 1) set(CMAKE_TRY_COMPILE_TARGET_TYPE STATIC_LIBRARY) # SET HERE THE PATH TO YOUR C99 AND C++ COMPILERS # 在这里添加编译器路径 set(PIX arm-none-eabi-) set(CMAKE_C_COMPILER ${PIX}gcc) set(CMAKE_CXX_COMPILER ${PIX}g++) set(CMAKE_C_COMPILER_WORKS 1 CACHE INTERNAL "") set(CMAKE_CXX_COMPILER_WORKS 1 CACHE INTERNAL "") # SET HERE YOUR BUILDING FLAGS set(FLAGS "-O2 -ffunction-sections -fdata-sections -fno-exceptions -mcpu=cortex-m4 -mfpu=fpv4-sp-d16 -mfloat-abi=hard -nostdlib -mthumb --param max-inline-insns-single=500 -D'RCUTILS_LOG_MIN_SEVERITY=RCUTILS_LOG_MIN_SEVERITY_NONE'" CACHE STRING "" FORCE) #-mcpu=cortex-m3 改成 -mcpu=cortex-m7 这里根据stm32内核更替 # 加入 mfpu=fpv5-d16 -mfloat-abi=hard 支持硬件浮点编译 这里根据stm32内核更替 set(CMAKE_C_FLAGS_INIT "-std=c11 ${FLAGS} -DCLOCK_MONOTONIC=0 -D'__attribute__(x)='" CACHE STRING "" FORCE) set(CMAKE_CXX_FLAGS_INIT "-std=c++11 ${FLAGS} -fno-rtti -DCLOCK_MONOTONIC=0 -D'__attribute__(x)='" CACHE STRING "" FORCE) set(__BIG_ENDIAN__ 0)注意:在toolchain.cmake中的
-mcpu=cortex-m4 -mfpu=fpv4-sp-d16 -mfloat-abi=hard部分最好根据生成的工程中cmake配置文件保持一致,此配置对stm32同意系列生效(一般同一系列内核保持一致,例如F1系列内核为M3,F4系列内核为M4)如下图所示
colcon.meta配置如下,此配置摘抄自 micro_ros_stm32cubemx_utils 配置文件如下图所示路径
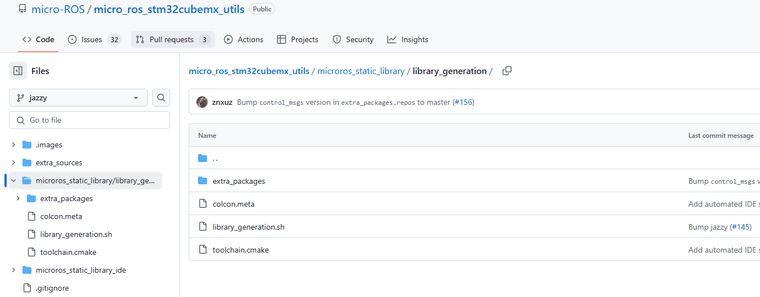
{ "names": { "tracetools": { "cmake-args": [ "-DTRACETOOLS_DISABLED=ON", "-DTRACETOOLS_STATUS_CHECKING_TOOL=OFF" ] }, "rosidl_typesupport": { "cmake-args": [ "-DROSIDL_TYPESUPPORT_SINGLE_TYPESUPPORT=ON" ] }, "rcl": { "cmake-args": [ "-DBUILD_TESTING=OFF", "-DRCL_COMMAND_LINE_ENABLED=OFF", "-DRCL_LOGGING_ENABLED=OFF" ] }, "rcutils": { "cmake-args": [ "-DENABLE_TESTING=OFF", "-DRCUTILS_NO_FILESYSTEM=ON", "-DRCUTILS_NO_THREAD_SUPPORT=ON", "-DRCUTILS_NO_64_ATOMIC=ON", "-DRCUTILS_AVOID_DYNAMIC_ALLOCATION=ON" ] }, "microxrcedds_client": { "cmake-args": [ "-DUCLIENT_PIC=OFF", "-DUCLIENT_PROFILE_UDP=OFF", "-DUCLIENT_PROFILE_TCP=OFF", "-DUCLIENT_PROFILE_DISCOVERY=OFF", "-DUCLIENT_PROFILE_SERIAL=OFF", "-UCLIENT_PROFILE_STREAM_FRAMING=ON", "-DUCLIENT_PROFILE_CUSTOM_TRANSPORT=ON" ] }, "rmw_microxrcedds": { "cmake-args": [ "-DRMW_UXRCE_MAX_NODES=1", "-DRMW_UXRCE_MAX_PUBLISHERS=10", "-DRMW_UXRCE_MAX_SUBSCRIPTIONS=5", "-DRMW_UXRCE_MAX_SERVICES=1", "-DRMW_UXRCE_MAX_CLIENTS=1", "-DRMW_UXRCE_MAX_HISTORY=4", "-DRMW_UXRCE_TRANSPORT=custom" ] } } }上述两个文件(toolchain.cmake colcon.meta)放入如下图所示的路径中
~/uros_ws/firmware/mcu_ws
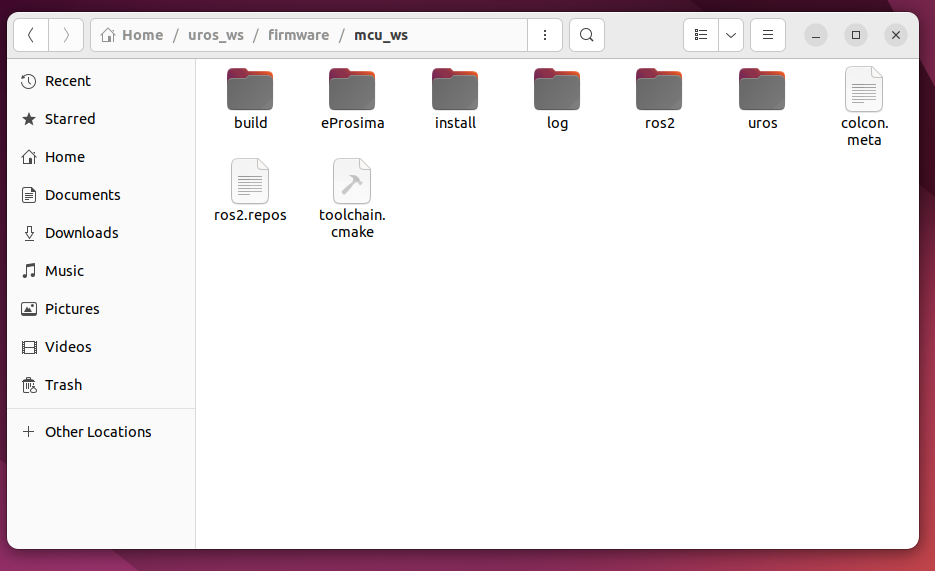
最后编译静态库ros2 run micro_ros_setup build_firmware.sh $(pwd)/firmware/mcu_ws/toolchain.cmake $(pwd)/firmware/mcu_ws/colcon.meta最后生成文件在firmware/build目录下,如下图所示
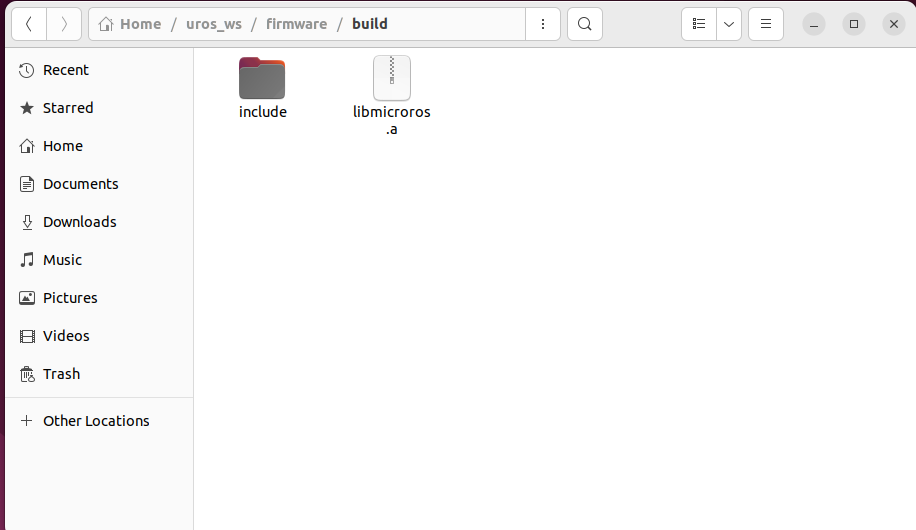
将inclue目录和静态库文件移植到stm32工程文件中即可使用二.使用静态库文件
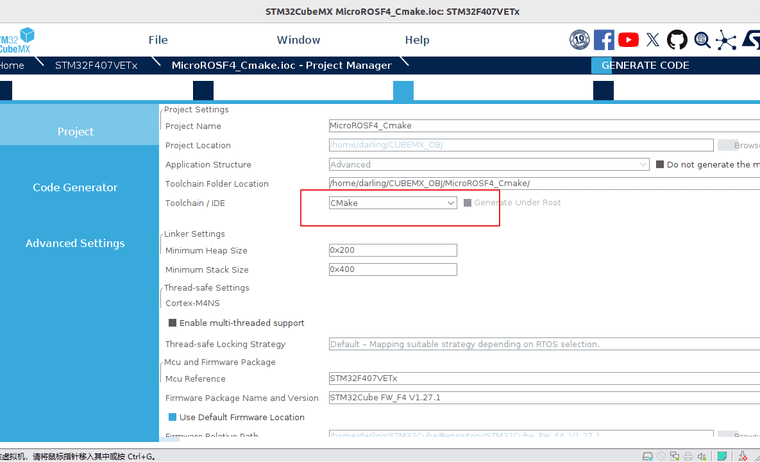
STM32方面配置可参考我上篇文章进行配置STM32配置流程只需注意最后生成工程选择cmake即可(cubemx可能需要更新到最新才有此选项)
在STM32 CMakeLists.txt文件中需要加入以下内容
编译C文件- custom_memory_manager.c
- microros_allocators.c
- microros_time.c
- microros_transports/dma_transport.c
如下图所示

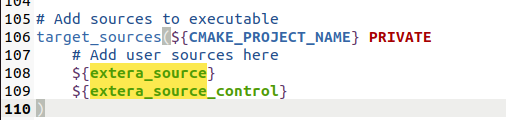
set(extera_source ${PROJECT_SOURCE_DIR}/Third-party/Lib_Microros/Src/custom_memory_manager.c ${PROJECT_SOURCE_DIR}/Third-party/Lib_Microros/Src/microros_allocators.c ${PROJECT_SOURCE_DIR}/Third-party/Lib_Microros/Src/microros_time.c ${PROJECT_SOURCE_DIR}/Third-party/Lib_Microros/Src/microros_transports/dma_transport.c )并在如下图位置加入即可
添加静态库文件- libmicroros.a
set(THIRD_PARTY_LIB "${PROJECT_SOURCE_DIR}/Third-party/Lib_Microros/lib/libmicroros.a")并在如下图位置加入即可

cmake内容如下,但由于该工程有其他库内容,读者只需看个模板即可,具体内容还是根据读者工程目录进行修改
cmake_minimum_required(VERSION 3.22) # # This file is generated only once, # and is not re-generated if converter is called multiple times. # # User is free to modify the file as much as necessary # # Setup compiler settings set(CMAKE_C_STANDARD 11) set(CMAKE_C_STANDARD_REQUIRED ON) set(CMAKE_C_EXTENSIONS ON) # Define the build type if(NOT CMAKE_BUILD_TYPE) set(CMAKE_BUILD_TYPE "Debug") endif() # Set the project name set(CMAKE_PROJECT_NAME MicroROSF4_Cmake) # Include toolchain file include("cmake/gcc-arm-none-eabi.cmake") # Enable compile command to ease indexing with e.g. clangd set(CMAKE_EXPORT_COMPILE_COMMANDS TRUE) # Core project settings project(${CMAKE_PROJECT_NAME}) message("Build type: " ${CMAKE_BUILD_TYPE}) # Enable CMake support for ASM and C languages enable_language(C ASM) # Create an executable object type add_executable(${CMAKE_PROJECT_NAME}) # Add STM32CubeMX generated sources add_subdirectory(cmake/stm32cubemx) # Link directories setup target_link_directories(${CMAKE_PROJECT_NAME} PRIVATE # Add user defined library search paths ) # # 3rd-party lib start # # set(THIRD_PARTY_LIB "${PROJECT_SOURCE_DIR}/Third-party/Lib_Microros/lib/libmicroros.a") set(extera_source_control ${PROJECT_SOURCE_DIR}/Third-party/control/Src/control.c ${PROJECT_SOURCE_DIR}/Third-party/control/Src/Encoder.c ${PROJECT_SOURCE_DIR}/Third-party/oled/Src/I2C_Fun.c ${PROJECT_SOURCE_DIR}/Third-party/imu/Src/ICM20948.c ${PROJECT_SOURCE_DIR}/Third-party/oled/Src/oled.c ${PROJECT_SOURCE_DIR}/Third-party/delay/Src/Delay.c ${PROJECT_SOURCE_DIR}/Third-party/robot_sys/Src/sys_struct.c ${PROJECT_SOURCE_DIR}/Third-party/MadgwickAHRS/Src/MadgwickAHRS.c ) set(extera_source ${PROJECT_SOURCE_DIR}/Third-party/Lib_Microros/Src/custom_memory_manager.c ${PROJECT_SOURCE_DIR}/Third-party/Lib_Microros/Src/microros_allocators.c ${PROJECT_SOURCE_DIR}/Third-party/Lib_Microros/Src/microros_time.c ${PROJECT_SOURCE_DIR}/Third-party/Lib_Microros/Src/microros_transports/dma_transport.c ) message(STATUS "dir is = ${PROJECT_SOURCE_DIR}") add_library(LibMicroros_app ${PROJECT_SOURCE_DIR}/Third-party/Lib_Microrosapp/Src/microrosclass_agent.cpp ) target_include_directories(LibMicroros_app PRIVATE ${PROJECT_SOURCE_DIR}/Third-party/Lib_Microros/Inc/microros_include ${PROJECT_SOURCE_DIR}/Third-party/Lib_Microrosapp/Inc ) target_sources(LibMicroros_app PRIVATE # Add user sources here ${extera_source} Third-party/Lib_Microrosapp/Src/microros_class.cpp ) target_link_libraries(LibMicroros_app PRIVATE stm32cubemx ${THIRD_PARTY_LIB} ) # # 3rd-party lib end # # # Add sources to executable target_sources(${CMAKE_PROJECT_NAME} PRIVATE # Add user sources here ${extera_source} ${extera_source_control} ) # Add include paths target_include_directories(${CMAKE_PROJECT_NAME} PRIVATE # Add user defined include paths ${PROJECT_SOURCE_DIR}/Third-party/Lib_Microros/Inc/microros_include ${PROJECT_SOURCE_DIR}/Third-party/Lib_Microrosapp/Inc ${PROJECT_SOURCE_DIR}/Third-party/MadgwickAHRS/Inc ${PROJECT_SOURCE_DIR}/Third-party/control/Inc ${PROJECT_SOURCE_DIR}/Third-party/oled/Inc ${PROJECT_SOURCE_DIR}/Third-party/imu/Inc ${PROJECT_SOURCE_DIR}/Third-party/robot_sys/Inc ${PROJECT_SOURCE_DIR}/Third-party/delay/Inc ) # Add project symbols (macros) target_compile_definitions(${CMAKE_PROJECT_NAME} PRIVATE # Add user defined symbols ) # Add linked libraries target_link_libraries(${CMAKE_PROJECT_NAME} stm32cubemx # Add user defined libraries LibMicroros_app # 自己生成的静态库 ${THIRD_PARTY_LIB} # 第三方静态库 )
剩下的内容可以查看我上一章节内容,主要是microros agent的构建与使用AGENT使用
-
你好,想问一下ros2 run micro_ros_setup create_firmware_ws.sh生成静态库的时候后面是不是该指定芯片的型号呀,应该在哪里找到支持的芯片型号?
我是在 https://github.com/micro-ROS/micro_ros_setup 这里Supported platforms里面找的,但是没有找到自己的stm32芯片该怎么办?
我这里用的是stm32 h723vgt6 -
@DedSecer 我这里是生成通用固件的静态库,你的h723是m7内核的,那么在toolchain配置那边修改m4改成m7即可,以及浮点运算配置也许修改,这个配置信息你可以在自己随便配置一个h723的芯片工程的toolchain.cmake里面看到这行信息
-
@2475887309 感谢大佬,那想问一下这个toolchain.cmake的具体路径是在哪呀,要自己添加这个文件的吗?
我在运行ros2 run micro_ros_setup create_firmware_ws.sh generate_lib generic之后在ros工作空间里面没有找到这个文件 -
@DedSecer 工作空间里生成firmware下面不会有toolchain.cmake文件,需要自己创建,这个内容和目录我都有在上面流程的第一部分里讲述,你看一下
-
@DedSecer 我上一次回复的有两个toolchain.cmake文件,一个是ros工作空间里需要配置的文件,另一个是使用stm32cubemx生成的工作空间也有个toolchain.cmake文件。现在需要做的是找到将ros工作空间里的toolchain.cmake里的内核配置和浮点运算配置要与stm32cubemx配置生成的toolchain.cmake里面的配置要保持一致,这两个配置要以stm32cubemx生成的配置为准
-
@2475887309 大佬,我这边还想问一下,我按照你上一篇文章修改了syscalls.c文件,后面编译的时候报错说
_sbrk这个函数重复定义了。Core/Src/syscalls.c和Core/Src/sysmem.c中的定义冲突了
想问一下应该保留哪个呀?另外想问加上这个syscalls.c文件的用意是什么?这个syscalls.c原本是要自己写的还是microros官方有模版的?
-
此回复已被删除! -
@DedSecer 删掉其中一个定义即可,其实syscalls.c就看工程编译的时候是否报错,报错就把syscalls.c文件内容加上即可,这个是st官方模板的,现新版本的cubeide里面是会自动生成该文件的。
-
@2475887309 感谢大佬,现在成功烧录进去了,上位机的程序也可以读到stm32发来的ros话题了。
还有个问题想问一下就是为什么要先在上位机上打开agent再接上开发版。如果想要在任何时候打开agent都能读到话题应该怎么做? -
@DedSecer 这个就可能是agent这边或者固件那边的逻辑问题了,最近我也在解决这个问题,我参考了arduino 版本的microros 中有个demo是关于agent重连的,不过没实现我理想的功能
 (我也没试过Arduino版本的重连demo是什么样的情况,因为每次重连,microros的api并没有正常返回我想要的数据),链接我这边给你,你也可以参考一下
(我也没试过Arduino版本的重连demo是什么样的情况,因为每次重连,microros的api并没有正常返回我想要的数据),链接我这边给你,你也可以参考一下https://github.com/micro-ROS/micro_ros_arduino/tree/kilted/examples/micro-ros_reconnection_example
-
@DedSecer 现在根据那个demo修改的代码我这边会出现的情况是,只要是上位机那边退出程序再打开程序,microros给的api ping的返回值结果还是未连接,不知道是不是我这边代码逻辑还是有问题啥的…你如果感兴趣也可以看一下,讨论一下

-
@2475887309 好,我这边研究一下
-
@2475887309 在 STM32系列MICROROS环境配置(更新 使用cmake管理) 中说:
${PROJECT_SOURCE_DIR}/Third-party/Lib_Microros/Src/custom_memory_manager.c ${PROJECT_SOURCE_DIR}/Third-party/Lib_Microros/Src/microros_allocators.c ${PROJECT_SOURCE_DIR}/Third-party/Lib_Microros/Src/microros_time.c ${PROJECT_SOURCE_DIR}/Third-party/Lib_Microros/Src/microros_transports/dma_transport.c这四个文件没有怎么办

-
@2039235330 这几个文件在extera source里面
-
@2475887309 好的好的,我找找,我可以在windows系统上的stm32开发环境中使用嘛,和jetson中的ros2连接

-
@2475887309 可是我没有找到extera source这个文件
 佬,这是为什么
佬,这是为什么 -
@2039235330 可以编译即可,这个系统不影响,只不过win可能麻烦一点(得有ros2环境,或者方便点就直接在Jetson上面去给stm32编译也行,通用的)
-
@2039235330 下面链接里面有https://github.com/micro-ROS/micro_ros_stm32cubemx_utils/tree/kilted/extra_sources
-
作者你好,我的ROS版本为Dashing,因为系统为ubuntu18.04,microROS最高支持到dashing。在按照你的教程执行到
ros2 run micro_ros_setup create_firmware_ws.sh generate_lib generic一步中,输出提示
Non valid RTOS/Platform: generate_lib/generic Available platforms: . freertos +-- crazyflie21 +-- olimex-stm32-e407 . host +-- generic . nuttx +-- olimex-stm32-e407 . raspbian +-- generic . zephyr +-- discovery_l475_iot1 +-- olimex-stm32-e407看样子可能是因为dashing版本的microROS还不支持通用Lib编译。一开始我用的jazzy版本就没这个问题。请问怎么解决呢?单片机为STM32F407VGT6