STM32系列MICROROS环境配置(更新 使用cmake管理)
-
@2475887309 感谢大佬,现在成功烧录进去了,上位机的程序也可以读到stm32发来的ros话题了。
还有个问题想问一下就是为什么要先在上位机上打开agent再接上开发版。如果想要在任何时候打开agent都能读到话题应该怎么做? -
@DedSecer 这个就可能是agent这边或者固件那边的逻辑问题了,最近我也在解决这个问题,我参考了arduino 版本的microros 中有个demo是关于agent重连的,不过没实现我理想的功能
 (我也没试过Arduino版本的重连demo是什么样的情况,因为每次重连,microros的api并没有正常返回我想要的数据),链接我这边给你,你也可以参考一下
(我也没试过Arduino版本的重连demo是什么样的情况,因为每次重连,microros的api并没有正常返回我想要的数据),链接我这边给你,你也可以参考一下https://github.com/micro-ROS/micro_ros_arduino/tree/kilted/examples/micro-ros_reconnection_example
-
@DedSecer 现在根据那个demo修改的代码我这边会出现的情况是,只要是上位机那边退出程序再打开程序,microros给的api ping的返回值结果还是未连接,不知道是不是我这边代码逻辑还是有问题啥的…你如果感兴趣也可以看一下,讨论一下

-
@2475887309 好,我这边研究一下
-
@2475887309 在 STM32系列MICROROS环境配置(更新 使用cmake管理) 中说:
${PROJECT_SOURCE_DIR}/Third-party/Lib_Microros/Src/custom_memory_manager.c ${PROJECT_SOURCE_DIR}/Third-party/Lib_Microros/Src/microros_allocators.c ${PROJECT_SOURCE_DIR}/Third-party/Lib_Microros/Src/microros_time.c ${PROJECT_SOURCE_DIR}/Third-party/Lib_Microros/Src/microros_transports/dma_transport.c这四个文件没有怎么办

-
@2039235330 这几个文件在extera source里面
-
@2475887309 好的好的,我找找,我可以在windows系统上的stm32开发环境中使用嘛,和jetson中的ros2连接

-
@2475887309 可是我没有找到extera source这个文件
 佬,这是为什么
佬,这是为什么 -
@2039235330 可以编译即可,这个系统不影响,只不过win可能麻烦一点(得有ros2环境,或者方便点就直接在Jetson上面去给stm32编译也行,通用的)
-
@2039235330 下面链接里面有https://github.com/micro-ROS/micro_ros_stm32cubemx_utils/tree/kilted/extra_sources
-
作者你好,我的ROS版本为Dashing,因为系统为ubuntu18.04,microROS最高支持到dashing。在按照你的教程执行到
ros2 run micro_ros_setup create_firmware_ws.sh generate_lib generic一步中,输出提示
Non valid RTOS/Platform: generate_lib/generic Available platforms: . freertos +-- crazyflie21 +-- olimex-stm32-e407 . host +-- generic . nuttx +-- olimex-stm32-e407 . raspbian +-- generic . zephyr +-- discovery_l475_iot1 +-- olimex-stm32-e407看样子可能是因为dashing版本的microROS还不支持通用Lib编译。一开始我用的jazzy版本就没这个问题。请问怎么解决呢?单片机为STM32F407VGT6
-
ros2 run micro_ros_setup build_firmware.sh $(pwd)/firmware/mcu_ws/toolchain.cmake $(pwd)/firmware/mcu_ws/colcon.meta
dalao, wozhegemeicidouyunxingbuguo,xianshifail -
@宇文修 先确定dashing版本有没有支持microros agent功能包,如果支持你可以用其他的ros版本生成lib(不过这个我没试过),如果dashing版本不支持microros agent的话,就算生成了库文件也不一定能使用了
-
@gwlove 截图啥的,或者来个日志啊
-
2 2475887309 在 中 引用了 这个主题
-
@2475887309 大佬
我烧录成功了,但是重新上电过后还是不行(用的stm32f407g-disc1)
-
@3598783181 先启动agent,再链接stm32上电
-
@2475887309 我试过了,也连接不上。真的要崩溃了
-
@3598783181 下午我给你一个固件烧录试试看
-
@3598783181 我刚刚按照流程重新生成了一个固件,emmm,我这边也是跟你一样的的情况,我也对比了我现在的工程流程,也没有多少差异,暂时没有找到问题所在,不过我现在工程是能够跑的,流程一样,是STM32断电,先启动linux的agent再给STM32上电连接串口(本工程用的是UART3作为上位机通信的接口),我把链接给你先试试能不能通信,如果能通信,那大概率是代码流程哪边有点问题,这个我后续再找一下原因(这个工程是半成品,有许多bug,只是验证通信功能的)
通过网盘分享的文件:MicroROSF4_Cmake.rar 链接: https://pan.baidu.com/s/15w_W3KOaqZTPafxBQEGAjQ?pwd=9pjv 提取码: 9pjv运行结果看下图
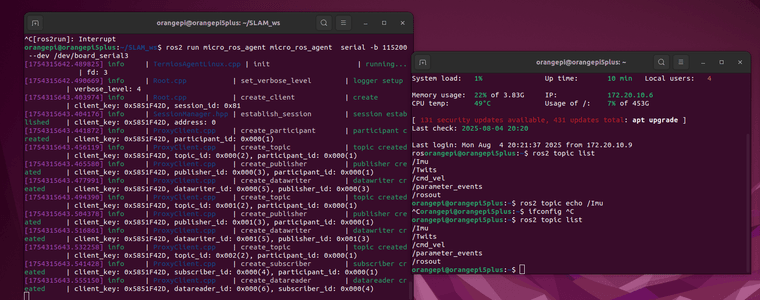
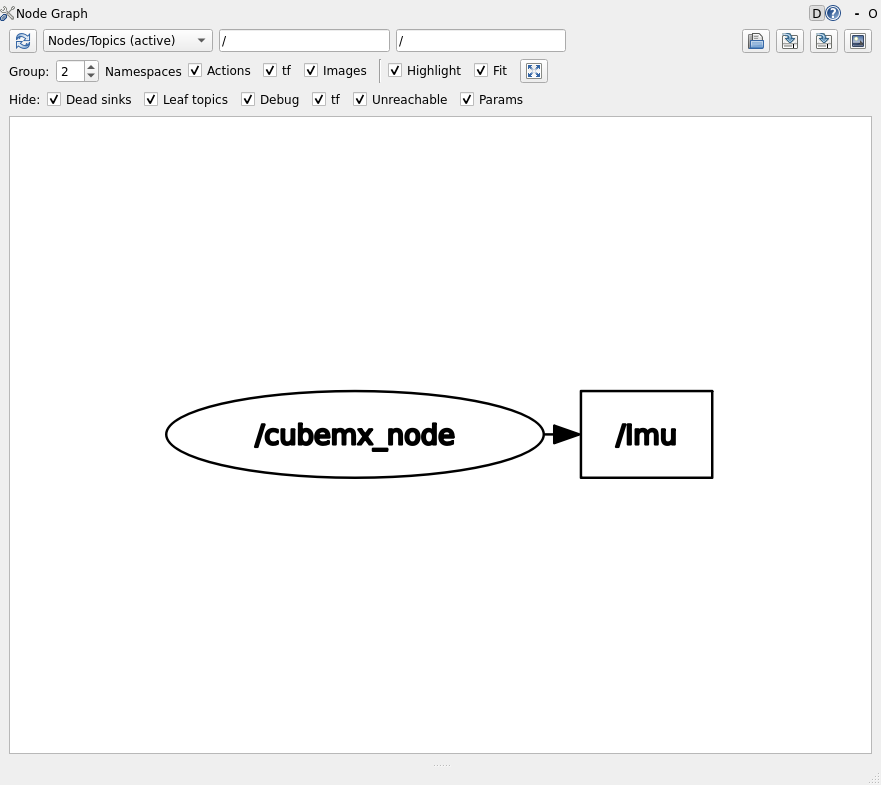
右侧会多出两个话题,rqt能看到节点图(如果你有imu的话)
-
-
@2475887309 感谢!!!