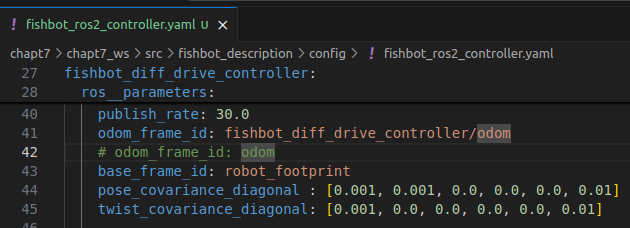
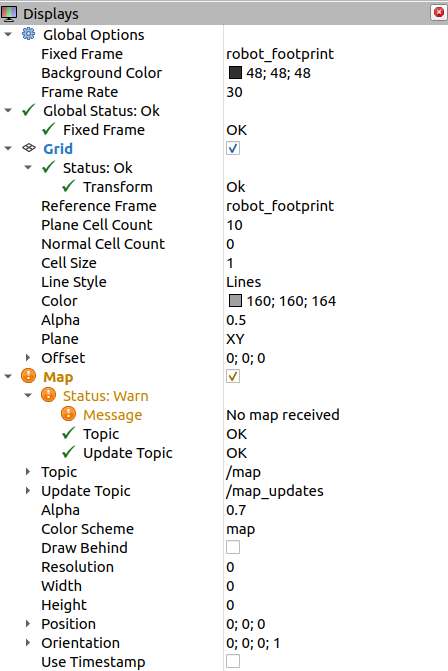
rviz中Map no map received,没有接受到地图信息
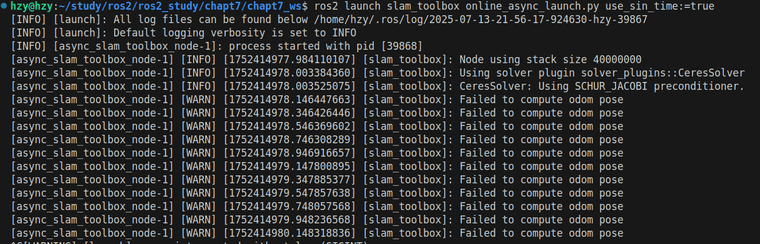
目前发现是时间不一致导致的,问如何解决
rviz显示如下
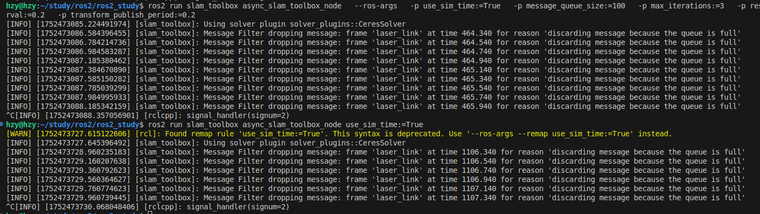
rqt显示如下
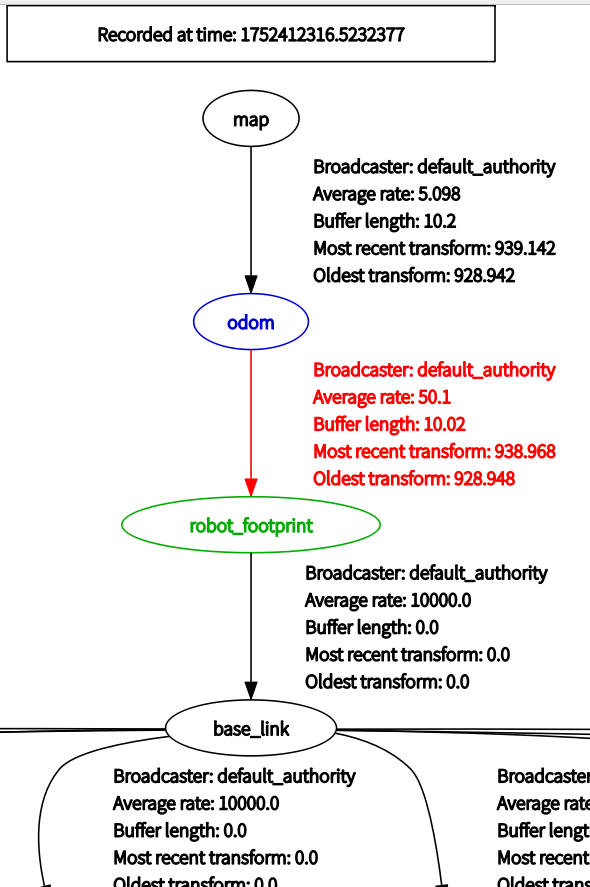
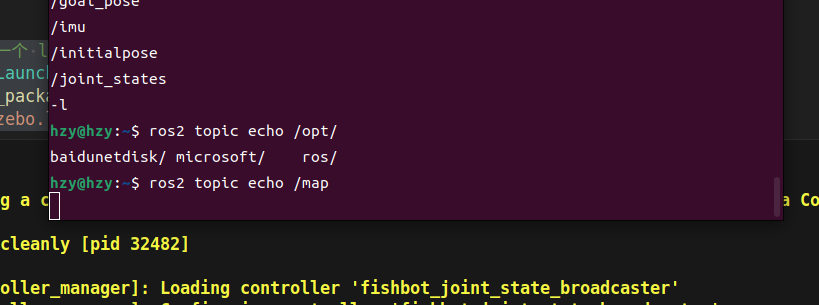
查看 map 无数据输出 odom无相关话题

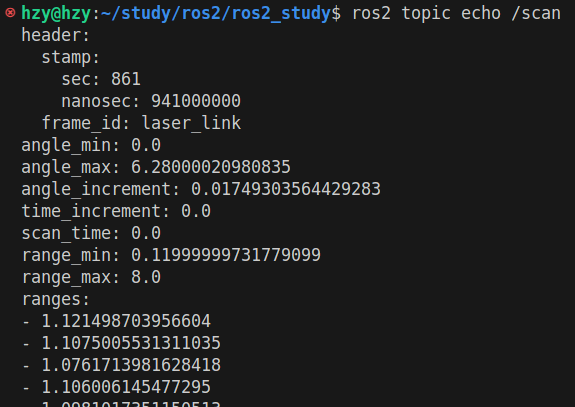
scan有输出

gazebo_sim.launch.py 代码
import launch
import launch_ros
from ament_index_python.packages import get_package_share_directory
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
# 获取默认路径
robot_name_in_model = "fishbot"
urdf_tutorial_path = get_package_share_directory('fishbot_description')
default_model_path = urdf_tutorial_path + '/urdf/fishbot/firstbot.urdf.xacro'
default_world_path = urdf_tutorial_path + '/world/custom_room.world'
# 为 Launch 声明参数
action_declare_arg_mode_path = launch.actions.DeclareLaunchArgument(
name='model', default_value=str(default_model_path),
description='URDF 的绝对路径')
# 获取文件内容生成新的参数
robot_description = launch_ros.parameter_descriptions.ParameterValue(
launch.substitutions.Command(
['xacro ', launch.substitutions.LaunchConfiguration('model')]),
value_type=str)
robot_state_publisher_node = launch_ros.actions.Node(
package='robot_state_publisher',
executable='robot_state_publisher',
parameters=[{'robot_description': robot_description}]
)
# 通过 IncludeLaunchDescription 包含另外一个 launch 文件
launch_gazebo = launch.actions.IncludeLaunchDescription(
PythonLaunchDescriptionSource([get_package_share_directory(
'gazebo_ros'), '/launch', '/gazebo.launch.py']),
# 传递参数
launch_arguments=[('world', default_world_path),('verbose','true')]
)
# 请求 Gazebo 加载机器人
spawn_entity_node = launch_ros.actions.Node(
package='gazebo_ros',
executable='spawn_entity.py',
arguments=['-topic', '/robot_description',
'-entity', robot_name_in_model, ])
# 加载并激活 fishbot_joint_state_broadcaster 控制器
load_joint_state_controller = launch.actions.ExecuteProcess(
cmd=['ros2', 'control', 'load_controller', '--set-state', 'active',
'fishbot_joint_state_broadcaster'],
output='screen'
)
# 加载并激活 fishbot_effort_controller 控制器
load_fishbot_effort_controller = launch.actions.ExecuteProcess(
cmd=['ros2', 'control', 'load_controller', '--set-state', 'active','fishbot_effort_controller'],
output='screen')
load_fishbot_diff_drive_controller = launch.actions.ExecuteProcess(
cmd=['ros2', 'control', 'load_controller', '--set-state', 'active','fishbot_diff_drive_controller'],
output='screen')
return launch.LaunchDescription([
action_declare_arg_mode_path,
robot_state_publisher_node,
launch_gazebo,
spawn_entity_node,
# 事件动作,当加载机器人结束后执行
launch.actions.RegisterEventHandler(
event_handler=launch.event_handlers.OnProcessExit(
target_action=spawn_entity_node,
on_exit=[load_joint_state_controller],)
),
# 事件动作,load_fishbot_diff_drive_controller
launch.actions.RegisterEventHandler(
event_handler=launch.event_handlers.OnProcessExit(
target_action=load_joint_state_controller,
on_exit=[load_fishbot_diff_drive_controller],)
),
])