使用導航時Global Status為error,RobotModel的status為error。
-
您好:
目前我想讓TB4可以自行導航,但現在遭遇幾個問題:
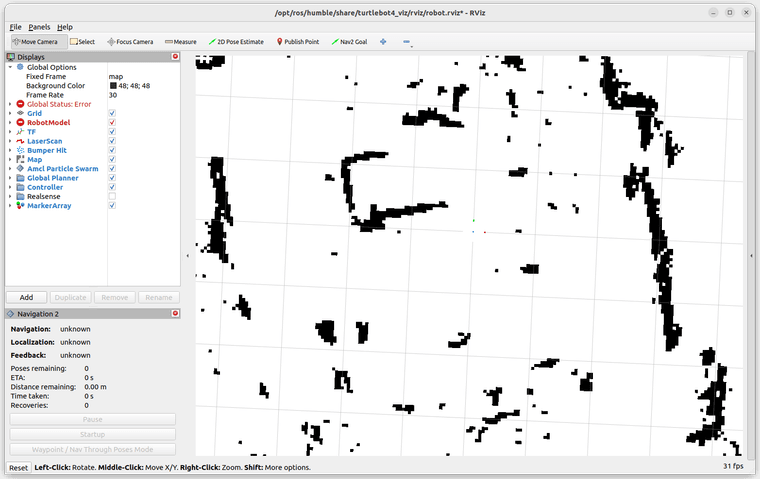
Screenshot from 2025-07-19 17-39-29.png(圖一)
我們目前遭遇到Global Status為error,RobotModel的status為error,有嘗試重連後還是沒辦法執行。
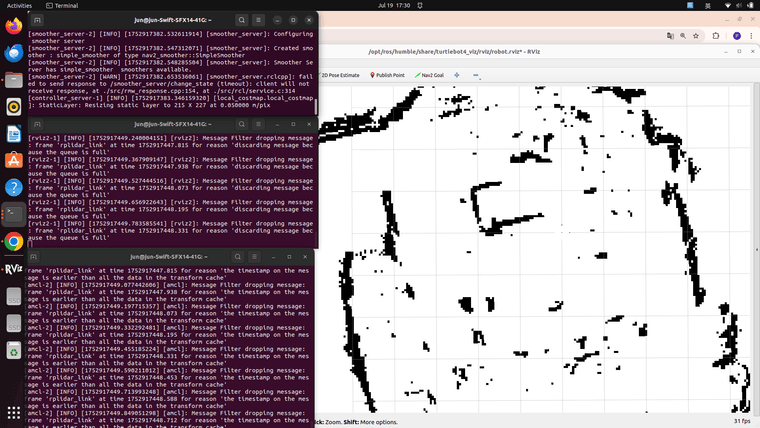
Screenshot from 2025-07-19 17-30-58.png(圖二)這張圖由上至下執行的終端機分別為
終端機1:
ros2 launch turtlebot4_navigation localization.launch.py map:=office.yaml
終端機2:
ros2 launch turtlebot4_navigation nav2.launch.py
終端機3:
ros2 launch turtlebot4_viz view_robot.launch.py)