FishbotV1.0.0.220721雷达驱动板原理图问题讨论确认
-
该版本原理图设计由@sdlcnet 完成。
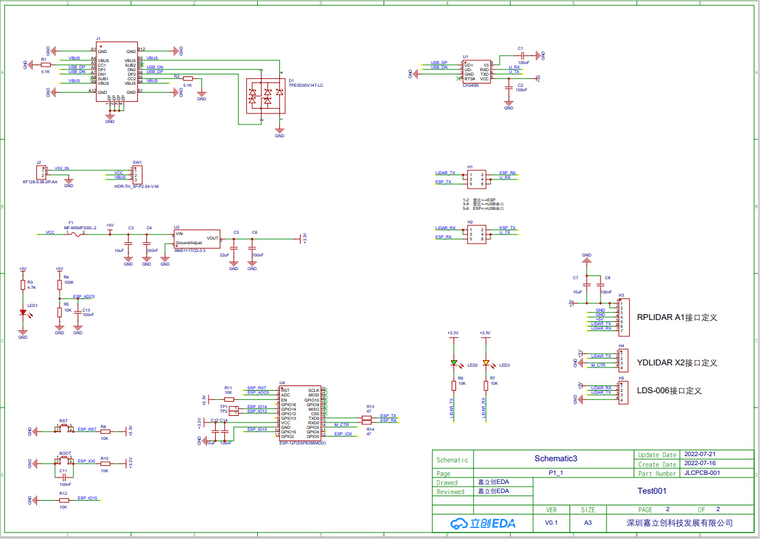
原理图如下:
-
@sdlcnet 抱歉,说昨天回的,拖延了一天,原理图不存在大问题,但有一些小细节可能需要再讨论下。
YDLIDARX2中M_CTR电机接口需要悬空
原因如下:目前看该调速接口是接到了
U4-ESP12F-GPIO5上,因为目前驱动固件采用的是AT固件,我尝试编译了几次没有通过,所以目前没办法对GPIO进行控制,该引脚的电平状态无法确认,目前这一版如果接上该引脚,估计会导致雷达转不起来。- 缺少ESP12F的电源开关
没理解错,SW1是用于选择VCC采用来自USB还是外接电源的。并无法控制ESP12的电源(USB模式下可以直接关闭ESP12节省电源)
3.缺少额外的通用雷达接线口
对于其他可以走串口协议的雷达,可以提供一个单独的排针接口(RX\TX),并预留一些5V/3.3V/GND接口,这样这块板子还可以当作USB转TTL使用。- 个人一些不清楚的地方
- ESP-ADC (R4\R5\C13)是起什么作用的,电压测量吗
- 采用TypeC是否一定多出R1和R2两个电阻(增加成本、ESP32用的nodemcu-microUSB接口,同一个车上两个不同接口了)
- RPLIDARA1 3/4接口是否有电机速度控制相关的,都接地是否可以
以上是对该原理图的个人修改建议、再次感谢对开源社区的支持。
-
@小鱼,根据以上几点疑问的回复如下:
-
如果使用非自制固件的话,应该无法对M_CTR引脚做控制,如果测试过M_CTR引脚悬空后,雷达工作没有问题的话,此引脚可以悬空。
-
SW1是作为选择电源用的。根据需要可以加上ESP12模块的电压开关或着关闭使能也能达到同样省电的目的。
-
这个想法很好,我把这个功能加上。
4.1 ESP-ADC是为了采集输入电压的,如果非自制固件的话,应该不存在此功能,由于ESP12F模块ADC输入只支持0-1V范围,所以需要对输入电压做分压处理;
4.2 Type-C的标准是作为从机时,需要在CC引脚加下拉电阻,否则可能在某种模式下主机没有供电;
上一版的雷达转接板原理图用的是nodeMCU,这一板不用NodeMCU了呀,所以换成TypeC了;
另外电机控制板用的esp32模组也不带microUSB口,所以后期打算统一用TypeC。4.3 此接口的定义是根据RPLIDAR A1开发套件上的usb转接板接口定义来做的,5V_MOTO和CTRL_MOTO连接在一起,GND_MOTO和GND连接在了一起。
-
-
-
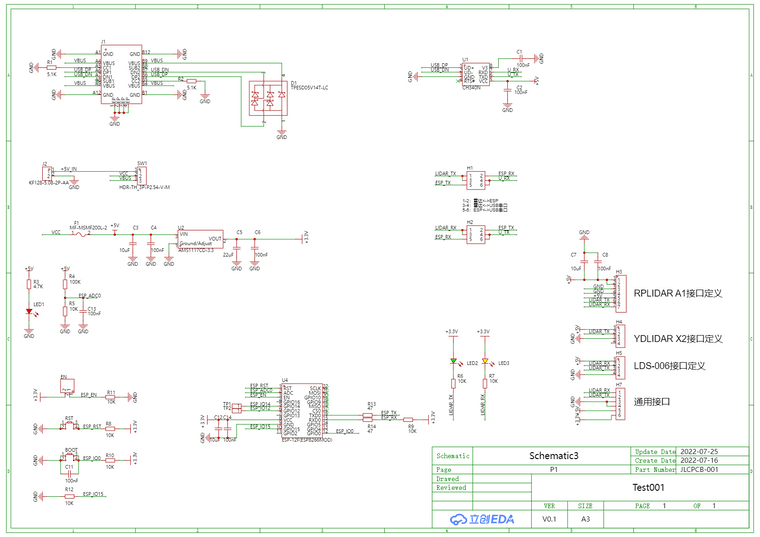
@小鱼 原理图已更新,再看下,没问题的话,下一步准备画PCB了
-
@fullstack80 有个小问题,C3&C4 和 C7&C8是否二留一即可。其他我觉得没有问题了。