机械臂加激光雷达三维感知 运行文件
-
机械臂加激光雷达实现三维环境感知避障
ros版本是melodic
https://github.com/fishros/robotarm-laser
使用
先启动gazebo仿真,再启动rviz,再启动laser_fusion和octomap_mapping
想实现一下不知道该运行哪个文件,求大佬告知 -
@C 先启动gazebo仿真,再启动rviz,再启动laser_fusion和octomap_mapping
试试下面的步骤哈
source devel/setup.bash roslaunch ur_gazebo ur5.launch rosrun laser_fusion laser_fusion_node roslaunch octomap_server octomap_mapping.launch -
请教一下这是什么问题导致的
-
@C 检查一下雷达话题和点云数据是否正常
-
@小鱼
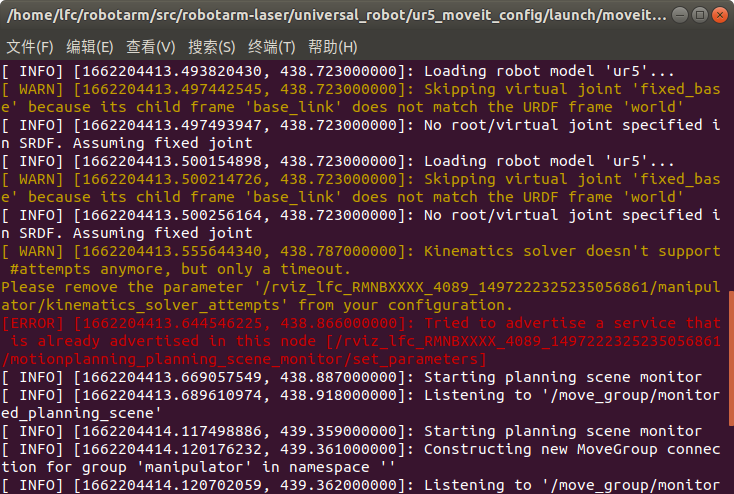
我运行完moveit和rviz后是这样,然后话题在下图,您有时间的时候麻烦受累帮看一眼
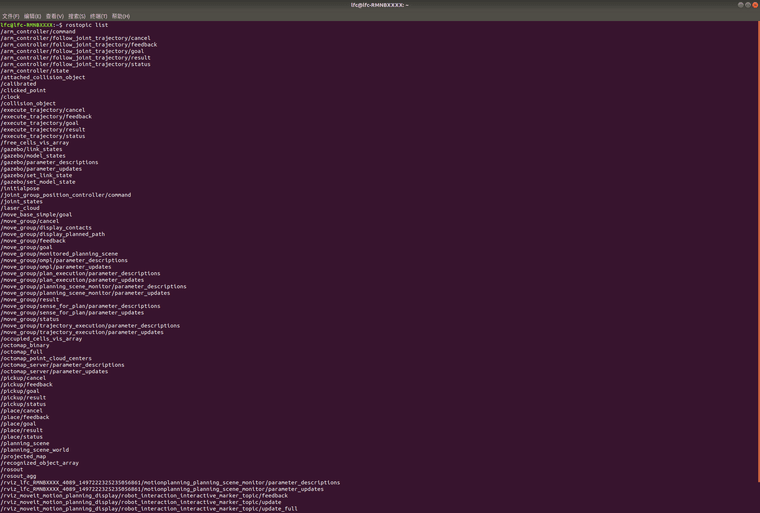
-
@C rostopic echo /scan 看看