@小鱼 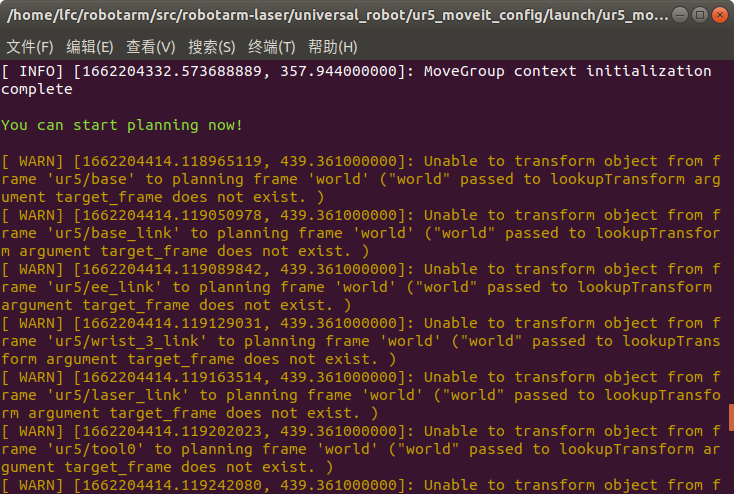
我运行完moveit和rviz后是这样,然后话题在下图,您有时间的时候麻烦受累帮看一眼
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
C 发布的最新帖子
-
机械臂加激光雷达三维感知 运行文件发布在 综合问题
机械臂加激光雷达实现三维环境感知避障
ros版本是melodic
https://github.com/fishros/robotarm-laser
使用
先启动gazebo仿真,再启动rviz,再启动laser_fusion和octomap_mapping
想实现一下不知道该运行哪个文件,求大佬告知