关于gmapping及其他建图方式发飘
-
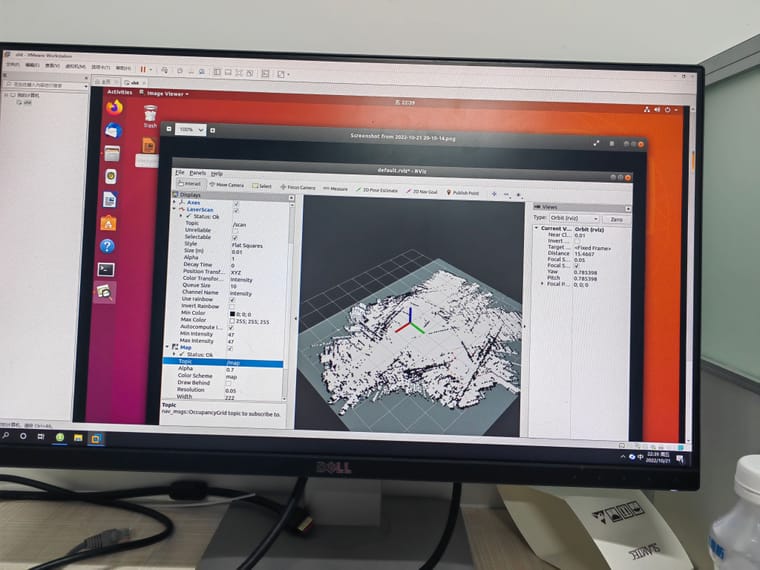
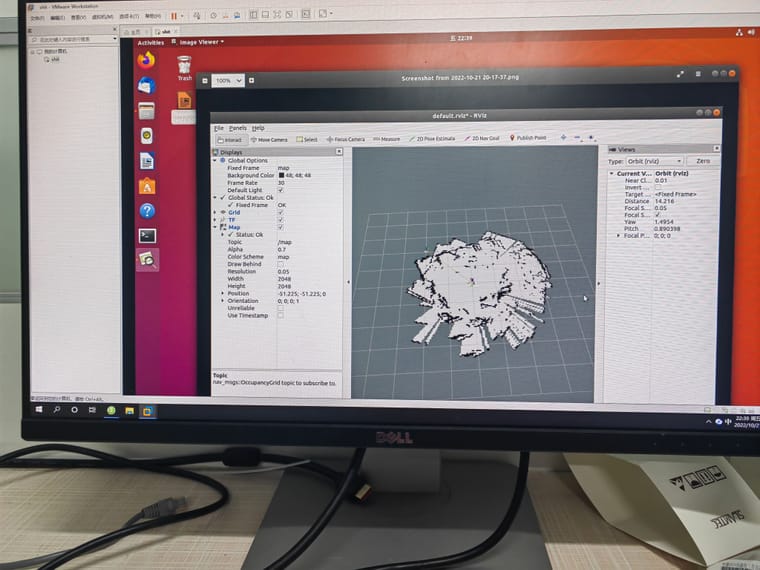
我基本测试的所有的功能都是类似情况,咨询了别人告诉我这是建图发飘了。
想问下问题出来哪里?下一步该怎么解决,谢谢大家
@gmapping@ros -
-
水平有限,不知道找问题的方向
-
@1054910797 出现这个问题可能性比较多,如果算法采用的是开源的。那问题最大的可能就是出现在了数据上。
可以采用hector_slam,检查雷达数据是否正常,重点是频率是否稳定,雷达点云是否异常。
雷达没问题再检查里程计数据,应该能找到原因。
祝好!
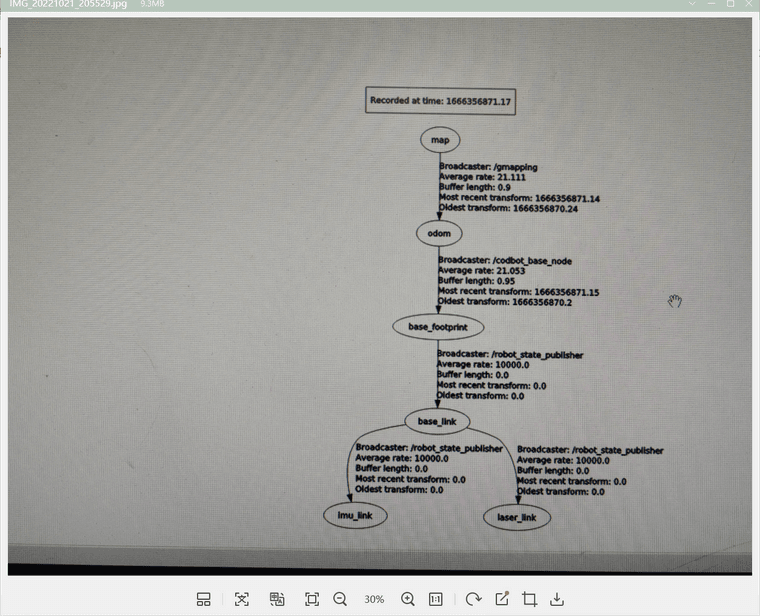
另外如果下次发帖可以将你的雷达型号、ROS版本、雷达频率、数据手册、建图时的速度及操作都附上,可以帮助快速定位问题,往往问题可能出现在不留心的小地方。
详细清阅读:
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
尽量提供更多的信息(大多数问题不是别人不知道如何解决,而是不知道你的问题是什么)