-
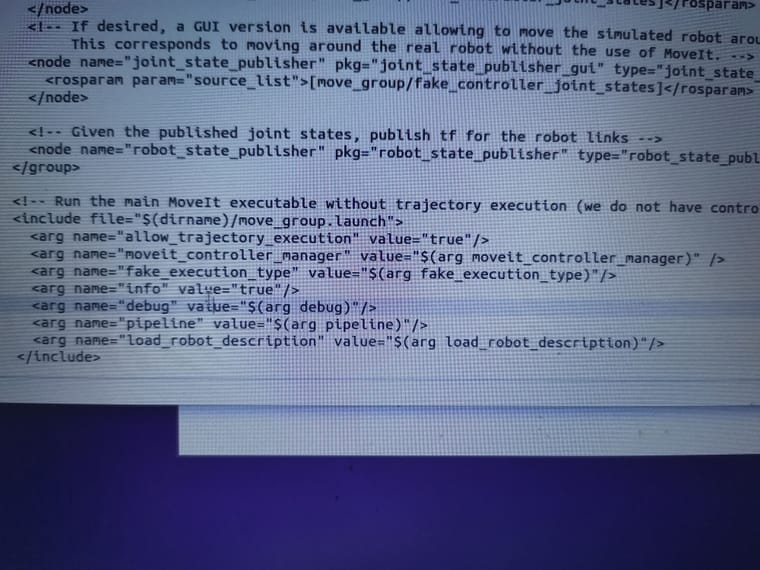
我现在使用的是noetic版ros ,控制真实机械臂,我看网上教程,第一部都是将demo.launch中的fake_execution改成false,但是我生成config中的demo.launch中,只有fake_execution_type,是将这个改成false吗?。!!
 )))我按照网上教程试了好多遍,最后一直显示,solution found but controller failed during execution。请问这是配置的有问题吗谢谢了。
)))我按照网上教程试了好多遍,最后一直显示,solution found but controller failed during execution。请问这是配置的有问题吗谢谢了。 -
 小 小鱼 从 中的 社区&开源 移动了该主题
小 小鱼 从 中的 社区&开源 移动了该主题
-
@2990853802 是修改fake_execution_type这个参数没问题,moveit的执行是通过action进行的,它在启动的时候会根据名字找到对应的执行器action动作名称,如果找不到就会出现失败的执行失败问题,所以应该是你的action server没有启动或者话题名称不对造成的。
解决方案如下:
- 确认actionserver是否启动
- 确认moveit是否加载到正确的action server名称
另外记得修改格式哈
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
基本的Markdown语法一定要学习下,有的小伙伴图片代码一团糟
-
@2990853802 请问你这个问题解决了吗