ROS2 Moveit2 相关话题请教
-
在设置好机械臂moveit相关信息后,我在尝试自己编写相关moveit代码时想获得当前机械臂的关节和某个机械臂的位姿信息,所以想通过自己编写一个话题订阅的方法来得到相关话题,但是对于具体哪个话题有相关的信息不太了解,所以想请教一下,目前一个一个试的时候发现/joint_states 可以获取相关的关节角度信息,然后在/display_planned_path里面获得了相关位置/速度/加速度信息(但是不知道为啥会和实际的有部分差别),所以想请教一下大家关于moveit2相关话题的获取。
版本类型:ros2 humble
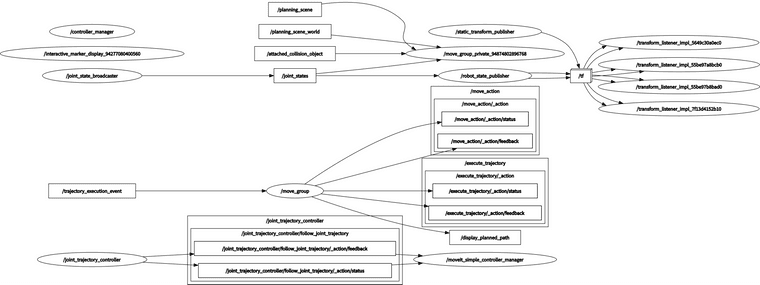
这是rosgraph对应的图片(想顺便知道一下move_group是如何控制相关关节运动的) -
pan@pan-System-Product-Name:~$ ros2 topic list -t /attached_collision_object [moveit_msgs/msg/AttachedCollisionObject] /clicked_point [geometry_msgs/msg/PointStamped] /collision_object [moveit_msgs/msg/CollisionObject] /display_contacts [visualization_msgs/msg/MarkerArray] /display_planned_path [moveit_msgs/msg/DisplayTrajectory] /dynamic_joint_states [control_msgs/msg/DynamicJointState] /goal_pose [geometry_msgs/msg/PoseStamped] /initialpose [geometry_msgs/msg/PoseWithCovarianceStamped] /joint_state_broadcaster/transition_event [lifecycle_msgs/msg/TransitionEvent] /joint_states [sensor_msgs/msg/JointState] /joint_trajectory_controller/joint_trajectory [trajectory_msgs/msg/JointTrajectory] /joint_trajectory_controller/state [control_msgs/msg/JointTrajectoryControllerState] /joint_trajectory_controller/transition_event [lifecycle_msgs/msg/TransitionEvent] /monitored_planning_scene [moveit_msgs/msg/PlanningScene] /motion_plan_request [moveit_msgs/msg/MotionPlanRequest] /parameter_events [rcl_interfaces/msg/ParameterEvent] /planning_scene [moveit_msgs/msg/PlanningScene] /planning_scene_world [moveit_msgs/msg/PlanningSceneWorld] /recognized_object_array [object_recognition_msgs/msg/RecognizedObjectArray] /robot_description [std_msgs/msg/String] /rosout [rcl_interfaces/msg/Log] /rviz_moveit_motion_planning_display/robot_interaction_interactive_marker_topic/feedback [visualization_msgs/msg/InteractiveMarkerFeedback] /rviz_moveit_motion_planning_display/robot_interaction_interactive_marker_topic/update [visualization_msgs/msg/InteractiveMarkerUpdate] /tf [tf2_msgs/msg/TFMessage] /tf_static [tf2_msgs/msg/TFMessage] /trajectory_execution_event [std_msgs/msg/String]这是相关话题
-
@空白 获取关节角度用joint_states,获取姿态用tf就可了
-
@小鱼 好的,谢谢,明天尝试一下
-
@小鱼 小鱼我还想顺便问一下,在之前看你文章 8.3 动手创建一个移动机器人 时有讲道通过新建发布者给/joint_state发布话题 然后/robot_state_publisher接收就可以改变机器人关节运动,那么我想问一下这个move_group的实际原理也还是这样嘛?
-
@空白 应该一样的
-
@空白 moveit的机制其实更加的复杂,move_group只负责规划,最后的执行是通过controller进行的(通过action通信将关节数据传递出去)
-
@小鱼 好的,谢谢小鱼