ros2 nav2 bt_navigator-7 process has died
-
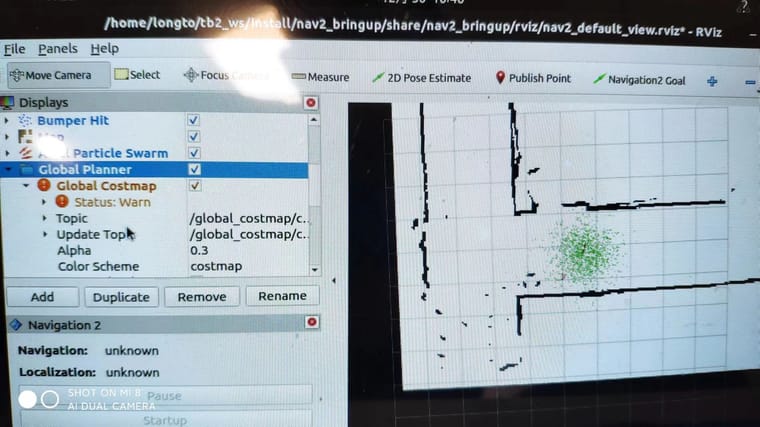
您好,我跑实际机器人导航,跑的是turtlebot3的源码,加载自己的地图,遇到下面的问题,地图能加载,但是没有出现global costmap 和local costmap。检查过雷达数据和历程计的数据都没有问题,使用cartographer能建图。请问一下还有什么其他的原因会出现这种情况呢?非常期待您的帮助,谢谢
-
@运动男孩 ros还是tos2?
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
一个好的提问不仅能够帮助自己理清楚问题,还有助于别人快速帮助到你。——提问的智慧
问题一定要描述清楚,终端打印一定复制粘贴,方便回答者检索和引用(你可以在linux系统上打开浏览器进社区)
基本的Markdown语法一定要学习下,有的小伙伴图片代码一团糟
提问时一定要提供尽可能多的信息(系统版本,ROS版本,前后操作,终端日志),包括你的目的,比如你其实想装装某个库遇到问题,不要只说这个问题,因为可能有更好的替代方案
先搜索再提问,很多问题其实都有解决方案,确保你自己对自己的问题有一定了解再提问
尽量一句话说完,不要把社区当微信聊天一样用,每一个回复都尽量提供更多的的信息。 -
@小鱼 不好意思,之前没有说清楚,是ROS2,导航的时候报下面的错误
[rviz2-10] [WARN] [1672714773.264824298] [rcl.logging_rosout]: Publisher already registered for provided node name. If this is due to multiple nodes with the same name then all logs for that logger name will go out over the existing publisher. As soon as any node with that name is destructed it will unregister the publisher, preventing any further logs for that name from being published on the rosout topic.
[rviz2-10] [ERROR] [1672714773.352966602] [rviz2]: Vertex Program:rviz/glsl120/indexed_8bit_image.vert Fragment Program:rviz/glsl120/indexed_8bit_image.frag GLSL link result :
[rviz2-10] active samplers with a different type refer to the same texture image unit[ERROR] [bt_navigator-7]: process has died [pid 2818, exit code -6, cmd '/home/longto/tb2_ws/install/nav2_bt_navigator/lib/nav2_bt_navigator/bt_navigator --ros-args -r __node:=bt_navigator --params-file /tmp/tmp6wu_tntj -r /tf:=tf -r /tf_static:=tf_static'].
-
@运动男孩 你可以先查看一下tf树是否正确
-
@Lorry 不好意思,打扰了。我重新下载代码,编译之后就没问题了。