小鱼 ROS 2 新书上线!点击链接查看, 新书配套视频点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
[FishBot教程] 2.配置助手介绍与下载
-
配置助手应该怎么升级?是直接输入新版本的指令就行了吗?
-
此回复已被删除! -
@1396452868 是的
-
这个要怎么解决啊。按照教程按8 准备一键部署docker但是没有成功 -
@961848173 先换源并清理第三方源
-
此回复已被删除! -
执行完Ubuntu22.04 CH340系列串口芯片无法识别终极问题解决方案后,运行docker时qt报错
xhost + && sudo docker run -it --rm --privileged -v /dev:/dev -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=unix:0.0 fishros2/fishbot-tool:v1.0.0.20230522 python3 main.py access control disabled, clients can connect from any host qt.qpa.xcb: could not connect to display unix:0.0 qt.qpa.plugin: Could not load the Qt platform plugin "xcb" in "" even though it was found. This application failed to start because no Qt platform plugin could be initialized. Reinstalling the application may fix this problem. Available platform plugins are: wayland-egl, minimalegl, vnc, eglfs, vkkhrdisplay, wayland, linuxfb, offscreen, xcb, minimal.查阅以往回复,确定已退出conda环境
运行echo $DISPLAY 结果为:0 -
@961848173 之前是不是成功运行过,直接复制粘贴之前的指令
-
 小 小鱼 在 中 引用了 这个主题
小 小鱼 在 中 引用了 这个主题
-
@neiyohank 感谢,我刚也碰到同样的问题了,这里补上重启指令方便其他人:
sudo service docker restart -
此回复已被删除! -
orangepi@orangepi5pro:~/桌面$ xhost + && sudo docker run -it --rm --privileged -v /dev:/dev -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=unix$DISPLAY fishros2/fishbot-tool:v1.0.0.20240219 python3 main.py
access control disabled, clients can connect from any host
WARNING: The requested image's platform (linux/amd64) does not match the detected host platform (linux/arm64/v8) and no specific platform was requested
exec /usr/bin/python3: exec format error -
@3210105304 在 [FishBot教程] 2.配置助手介绍与下载 中说:
orangepi@orangepi5pro:~/桌面$ xhost + && sudo docker run -it --rm --privileged -v /dev:/dev -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=unix$DISPLAY fishros2/fishbot-tool:v1.0.0.20240219 python3 main.py
access control disabled, clients can connect from any host
WARNING: The requested image's platform (linux/amd64) does not match the detected host platform (linux/arm64/v8) and no specific platform was requested
exec /usr/bin/python3: exec format error -
在您提供的命令和输出中,您遇到了几个问题。首先,让我们逐一解析这些信息,并尝试提供解决方案。
-
xhost +:这个命令用于允许任何主机连接到X server。这通常用于远程桌面会话或允许Docker容器内的应用程序访问主机的图形界面。使用&&来确保xhost +成功执行后再执行后面的sudo docker run命令。 -
sudo docker run -it --rm --privileged -v /dev:/dev -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=unix$DISPLAY fishros2/fishbot-tool:v1.0.0.20240219 python3 main.py:这是Docker命令,用于运行一个名为fishros2/fishbot-tool的Docker镜像。这个命令尝试挂载主机的/dev和/tmp/.X11-unix到容器内,并设置DISPLAY环境变量以允许容器内的应用程序访问X server。 -
WARNING: The requested image's platform (linux/amd64) does not match the detected host platform (linux/arm64/v8) and no specific platform was requested:这个警告表明您尝试运行的Docker镜像是为linux/amd64(即x86_64架构)构建的,但是您的主机是linux/arm64/v8(即ARM64架构,如Orange Pi等)。由于架构不匹配,Docker无法直接运行该镜像。 -
exec /usr/bin/python3: exec format error:这个错误通常意味着您尝试执行的二进制文件与当前系统的架构不匹配。在这种情况下,由于Docker镜像是为x86_64构建的,而您的主机是ARM64,因此python3二进制文件无法执行。
解决方案:
-
寻找适合ARM64的镜像:您需要找到一个为ARM64架构构建的
fishros2/fishbot-tool镜像,或者构建自己的镜像。您可以在Docker Hub或GitHub上查找相关信息,或者联系镜像的维护者以获取帮助。 -
构建自己的镜像:如果您有源代码,并且源代码是跨平台的,您可以在自己的ARM64机器上构建Docker镜像。这通常涉及编写一个
Dockerfile,并使用docker build命令来构建镜像。 -
使用其他方法运行应用程序:如果找不到适合ARM64的Docker镜像,并且无法自己构建,您可能需要考虑其他方法来运行该应用程序,比如直接在ARM64机器上安装和配置必要的依赖项,然后运行应用程序。
最后,请注意,在ARM架构的机器上运行为x86架构构建的Docker镜像通常不是一个简单的任务,因为需要处理二进制兼容性和其他潜在问题。因此,寻找或构建适合您架构的镜像通常是最佳解决方案。
以上为生成回答,仅供参考~
-
-
@3210105304 清尝试CLI版本配置助手或者Windows版本:https://github.com/fishros/fishbot_tool/releases
-
在 [FishBot教程] 2.配置助手介绍与下载 中说:
xhost + && sudo docker run -it --rm --privileged -v /dev:/dev -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=unix$DISPLAY fishros2/fishbot-tool:v1.0.0.20240219 python3 main.py
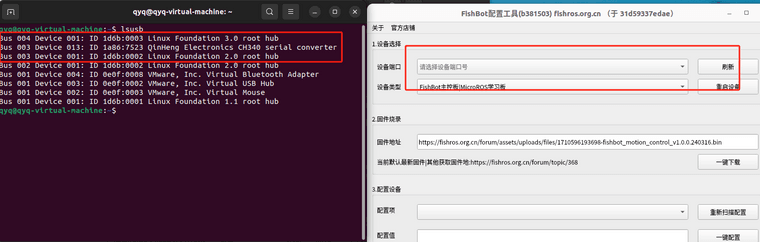 有设备,但配置助手无法读取到该设备
有设备,但配置助手无法读取到该设备 -
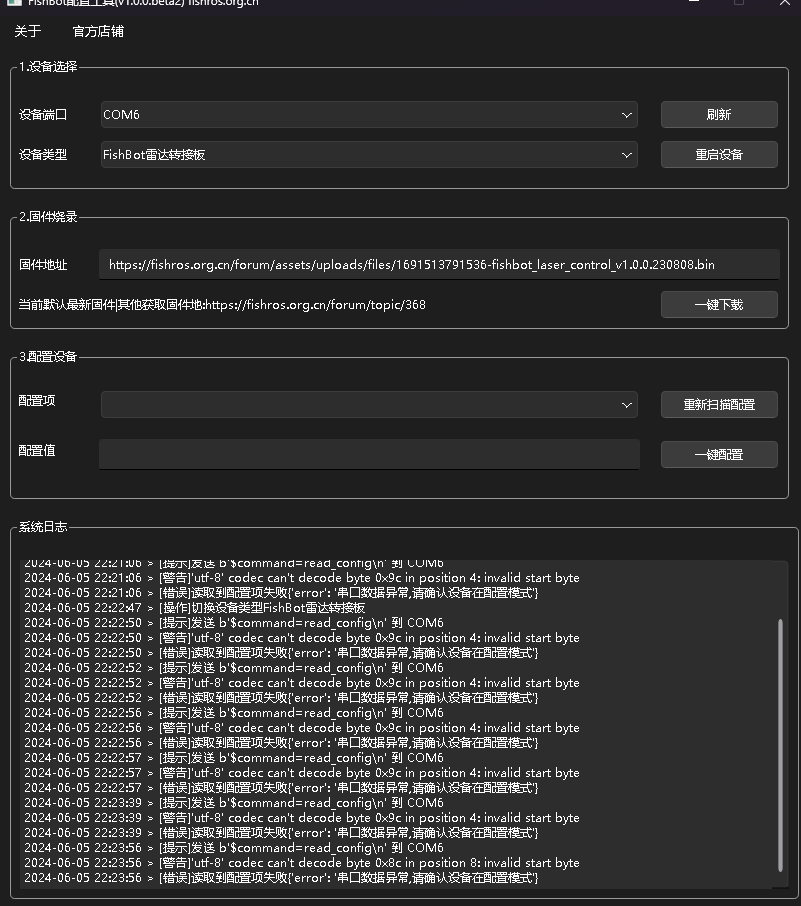
@414115309 使用windows版本可以,但是烧录雷达时,点击重新扫描配置时,会重启雷达,导致雷达一直在配置模式和普通模式切换,无法获得配置及修改配置
-
@414115309 @小鱼 帮忙看一下
-
@414115309 我想修改雷达中wifi的名字和密码信息,
-
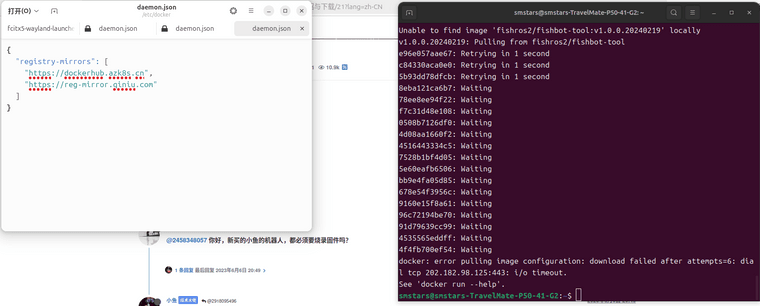
fish大佬,我看了帖子之后发现我的还是下载不成功,重启docker好多次了,请问是什么问题呀
-
@Panzhiyu6666 试一试国内版:配置助手国内:xhost + && sudo docker run -it --rm --privileged -v /dev:/dev -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=unix$DISPLAY dockerproxy.com/fishros2/fishbot-tool:v1.0.0.20230522 python3 main.py
小鱼 ROS 2 新书上线!书籍购买链接: https://m.tb.cn/h.gFDBx39
新书配套视频:https://www.bilibili.com/video/BV1GW42197Ck/