[FishBot] 9.0.2.配置助手介绍与下载
-
[FishBot] 9.0.2.配置助手介绍与下载
你好,我是小鱼,本节我们主要介绍FishBot配置工具的下载与基本使用方式。
FishBot助手是小鱼编写的一个主要用于FishBot硬件固件升级与配置的工具。秉持开源的极客精神,配置助手所有源代码是开放的,你在玩机的同时也可以随时参与到FishBot的开发工作中来。
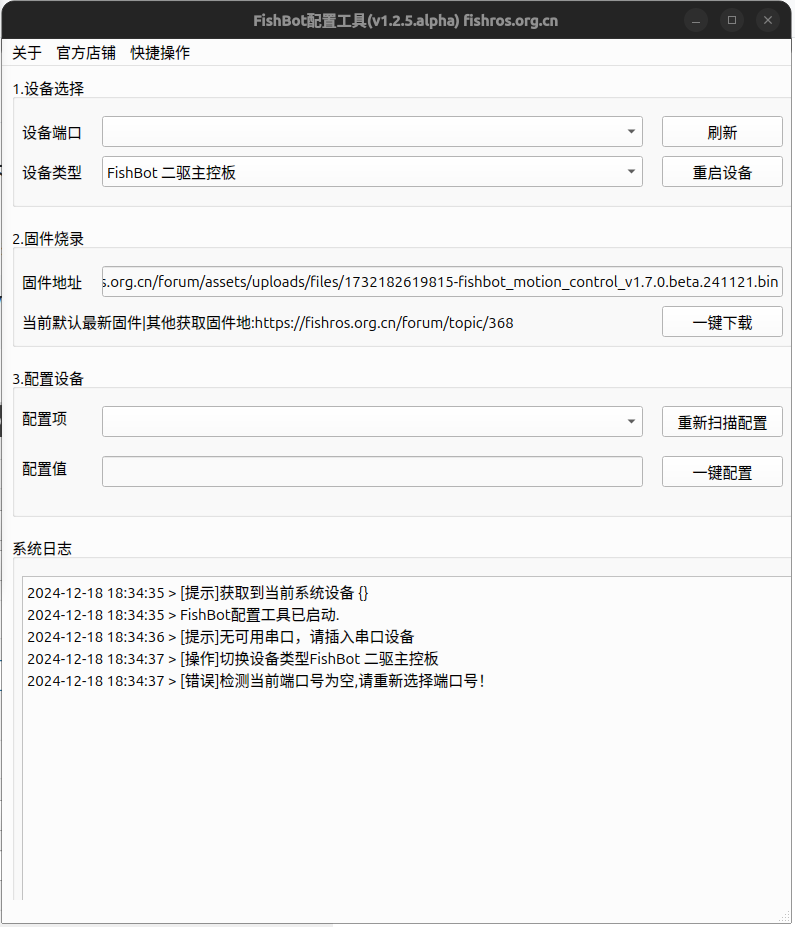
工具主界面如下:
一、下载配置助手
配置助手提供二进制/源码/Docker三种使用方式,最为推荐二进制方式。
1.1 二进制下载运行【推荐】
1.1.1 下载配置助手
- Linux: https://github.com/fishros/fishbot_tool/releases/download/v1.2.5.alpha/fishbot_tool.v1.2.5.alpha.linux_amd64
- Windows:
https://github.com/fishros/fishbot_tool/releases/download/v1.2.5.alpha/fishbot_tool.v1.2.5.alpha.win.exe
若下载失败可尝试使用代理下载,在原链接前增加前缀 http://github.fishros.org/ 即可,如
- Linux版本:
http://github.fishros.org/https://github.com/fishros/fishbot_tool/releases/download/v1.2.5.alpha/fishbot_tool.v1.2.5.alpha.linux_amd64 - Windows版本:
http://github.fishros.org/https://github.com/fishros/fishbot_tool/releases/download/v1.2.5.alpha/fishbot_tool.v1.2.5.alpha.win.exe
注意:Windows版本未签名,注意不要被操作系统误杀
1.1.1 运行配置助手
- Linux下载后需要先给可执行权限(文件上右击,允许作为可执行文件即可),然后双击运行。
- WIndows直接双击运行即可
1.2 Docker方式(仅适用Linux AMD64平台)
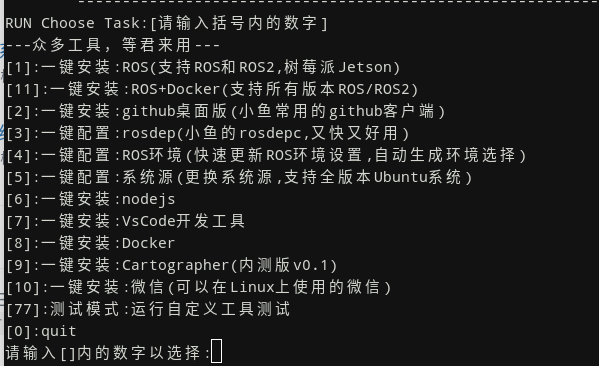
1.2.1 安装Docker
打开终端,复制粘贴输入下面代码
wget http://fishros.com/install -O fishros && . fishros接着输入密码,在下面的界面输入8,一键安装Docker,完成后等待即可。
1.2.2 运行Docker版本配置助手
安装完成Docker后打开终端,输入下面的指令
xhost + && sudo docker run -it --rm --privileged -v /dev:/dev -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=unix$DISPLAY fishros2/fishbot_tool:v1.1.1.alpha注意,最新版的配置助手请从发布页面获取:https://github.com/fishros/fishbot_tool/releases
稍微等待下载完成,你将看到上面的配置助手界面启动了。
二、功能介绍
配置助手主要功能是烧录固件和配置设备的,所以从上到下分为,设备选择、固件烧录、设备配置三个模块。
设备选择
启动时会自动扫描可用端口号,如果启动后插入的设备,可以通过点击刷新进行刷新。
设备类型目前支持8种(配置助手版本为V1.2.5以上),分别为:
- FishBot二驱主控板(也就是MicroROS学习板)
- FishBot四驱主控板
- FishBot四驱主控板V2
- FishBot雷达转接板
- FishBot Camera 视觉模组V2.0
- FishBot ESP32Camera
- FishBot 多路超声波控制板
- ROS2多协议传输控制板
在右侧也设计了一个重启按钮,当设备选择正确情况下,点击重启设备可以完成对设备的重启。
固件烧录
FishBot的所有固件发布在 https://fishros.org.cn/forum/topic/368 中,你可以进入发布页面,在对应的固件上右击复制链接,然后手动将链接粘贴到固件地址框中,点击一键下载,此时配置助手会自动从网上下载固件并将其烧录到设备中。
配置设备
无论是FishBot主控板还是MicroROS学习板都有非常多的配置项供我们修改,下载完成设备,点击重新扫描配置,即可从设备端获取到当前设备所支持的所有配置项及当前值。
在配置值中输入对应的值,接着点击一键配置即可修改当前配置项对应的值。
三、总结
以上就是我们的配置工具的简单介绍,下一篇小鱼带你一起给主控板刷入固件并进行配置测试。
如遇到问题,欢迎在社区发帖讨论~
-
 小 小鱼 在 中 引用了 这个主题
小 小鱼 在 中 引用了 这个主题
-
此回复已被删除! -
@1312953916 主要原因还是网络问题,Ctrl+C打断试试,下次我考虑减小镜像体积。
也可以尝试使用镜像加速器:https://developer.aliyun.com/article/886423
Azure 中国镜像 https://dockerhub.azk8s.cn
我们以 Azure 中国镜像 https://dockerhub.azk8s.cn 为例进行介绍。
Ubuntu 16.04+、Debian 8+、CentOS 7
对于使用 systemd 的系统,请在 /etc/docker/daemon.json 中写入如下内容(如果文件不存在请新建该文件){ "registry-mirrors": [ "https://dockerhub.azk8s.cn", "https://reg-mirror.qiniu.com" ] }注意,一定要保证该文件符合 json 规范,否则 Docker 将不能启动。
之后重新启动服务。$ sudo systemctl daemon-reload $ sudo systemctl restart docker -
此回复已被删除! -
此回复已被删除! -
此回复已被删除! -
此回复已被删除! -
此回复已被删除! -
此回复已被删除! -
此回复已被删除! -
此回复已被删除! -
此回复已被删除! -
此回复已被删除! -
此回复已被删除! -
此回复已被删除! -
此回复已被删除! -
此回复已被删除! -
此回复已被删除! -
此回复已被删除! -
此回复已被删除!