已创建插件
RAstar_ros.h
/* iPath: A C++ Library of Intelligent Global Path Planners for Mobile Robots
* with ROS Integration. Website: http://www.iroboapp.org/index.php?title=IPath
* Contact:
*
* Copyright (c) 2014
* Owners: Al-Imam University/King AbdulAziz Center for Science and Technology
* (KACST)/Prince Sultan University All rights reserved.
*
* License Type: GNU GPL
*
* This program is free software: you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation, either version 3 of the License, or
* (at your option) any later version.
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program. If not, see <http://www.gnu.org/licenses/>.
*/
#include <netdb.h>
#include <netinet/in.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/socket.h>
#include <sys/types.h>
#include <unistd.h>
#include <string>
/** include ros libraries**********************/
#include <actionlib/client/simple_action_client.h>
#include <geometry_msgs/PoseStamped.h>
#include <geometry_msgs/PoseWithCovarianceStamped.h>
#include <geometry_msgs/Twist.h>
#include <move_base_msgs/MoveBaseAction.h>
#include <move_base_msgs/MoveBaseActionGoal.h>
#include <move_base_msgs/MoveBaseGoal.h>
#include <nav_msgs/GetPlan.h>
#include <nav_msgs/OccupancyGrid.h>
#include <nav_msgs/Odometry.h>
#include <nav_msgs/Path.h>
#include <ros/ros.h>
#include <tf/tf.h>
#include <tf/transform_datatypes.h>
#include <tf/transform_listener.h>
#include "sensor_msgs/LaserScan.h"
#include "sensor_msgs/PointCloud2.h"
/** ********************************************/
#include <boost/foreach.hpp>
//#define forEach BOOST_FOREACH
/** for global path planner interface */
#include <angles/angles.h>
#include <costmap_2d/costmap_2d.h>
#include <costmap_2d/costmap_2d_ros.h>
#include <geometry_msgs/PoseStamped.h>
#include <nav_core/base_global_planner.h>
//#include <pcl_conversions/pcl_conversions.h>
#include <base_local_planner/costmap_model.h>
#include <base_local_planner/world_model.h>
#include <set>
using namespace std;
using std::string;
#ifndef RASTAR_ROS_CPP
#define RASTAR_ROS_CPP
/**
* @struct cells
* @brief A struct that represents a cell and its fCost.
*/
struct cells {
int currentCell;
float fCost;
};
// STEP1-2.your class should inherits from the interface
// "nav_core::BaseGlobalPlanner"
namespace RAstar_planner {
class RAstarPlannerROS : public nav_core::BaseGlobalPlanner {
public:
RAstarPlannerROS(ros::NodeHandle&); // this constructor is may be not needed
RAstarPlannerROS();
RAstarPlannerROS(std::string name, costmap_2d::Costmap2DROS* costmap_ros);
ros::NodeHandle ROSNodeHandle;
/** 公有继承 nav_core::BaseGlobalPlanner 接口 **/
/** overriden classes from interface nav_core::BaseGlobalPlanner **/
void initialize(std::string name, costmap_2d::Costmap2DROS* costmap_ros);
bool makePlan(const geometry_msgs::PoseStamped& start,
const geometry_msgs::PoseStamped& goal,
std::vector<geometry_msgs::PoseStamped>& plan);
void getCorrdinate(float& x, float& y);
int convertToCellIndex(float x, float y);
void convertToCoordinate(int index, float& x, float& y);
bool isCellInsideMap(float x, float y);
void mapToWorld(double mx, double my, double& wx, double& wy);
vector<int> RAstarPlanner(int startCell, int goalCell);
vector<int> findPath(int startCell, int goalCell, float g_score[]);
vector<int> constructPath(int startCell, int goalCell, float g_score[]);
float calculateHCost(int cellID, int goalCell) {
int x1 = getCellRowID(goalCell);
int y1 = getCellColID(goalCell);
int x2 = getCellRowID(cellID);
int y2 = getCellColID(cellID);
return abs(x1 - x2) + abs(y1 - y2);
// return min(abs(x1-x2),abs(y1-y2))*sqrt(2) +
// max(abs(x1-x2),abs(y1-y2))-min(abs(x1-x2),abs(y1-y2));
}
void addNeighborCellToOpenList(multiset<cells>& OPL, int neighborCell,
int goalCell, float g_score[]);
vector<int> findFreeNeighborCell(int CellID);
bool isStartAndGoalCellsValid(int startCell, int goalCell);
float getMoveCost(int CellID1, int CellID2);
float getMoveCost(int i1, int j1, int i2, int j2);
bool isFree(int CellID); // returns true if the cell is Free
bool isFree(int i, int j);
int getCellIndex(int i,
int j) // get the index of the cell to be used in Path
{
return (i * width) + j;
}
int getCellRowID(int index) // get the row ID from cell index
{
return index / width;
}
int getCellColID(int index) // get colunm ID from cell index
{
return index % width;
}
float originX;
float originY;
float resolution;
costmap_2d::Costmap2DROS* costmap_ros_;
double step_size_, min_dist_from_robot_;
costmap_2d::Costmap2D* costmap_;
// base_local_planner::WorldModel* world_model_;
bool initialized_;
int width;
int height;
};
}; // namespace RAstar_planner
#endif
已创建基类并注册插件
RAstar_ros.cpp
/* iPath: A C++ Library of Intelligent Global Path Planners for Mobile Robots
* with ROS Integration. Website: http://www.iroboapp.org/index.php?title=IPath
* Contact:
*
* Copyright (c) 2014
* Owners: Al-Imam University/King AbdulAziz Center for Science and Technology
* (KACST)/Prince Sultan University All rights reserved.
*
* License Type: GNU GPL
*
* This program is free software: you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation, either version 3 of the License, or
* (at your option) any later version.
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program. If not, see <http://www.gnu.org/licenses/>.
*/
#include <netdb.h>
#include <netinet/in.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/socket.h>
#include <sys/types.h>
#include <unistd.h>
#include <fstream>
#include <iomanip>
#include <iostream>
#include <string>
// STEP1-1.include core ROS libraries -> nav_core roscpp rospy std_msgs
#include "RAstar_ros.h"
// STEP1-4.include <pluginlib/class_list_macros.h>
#include <pluginlib/class_list_macros.h>
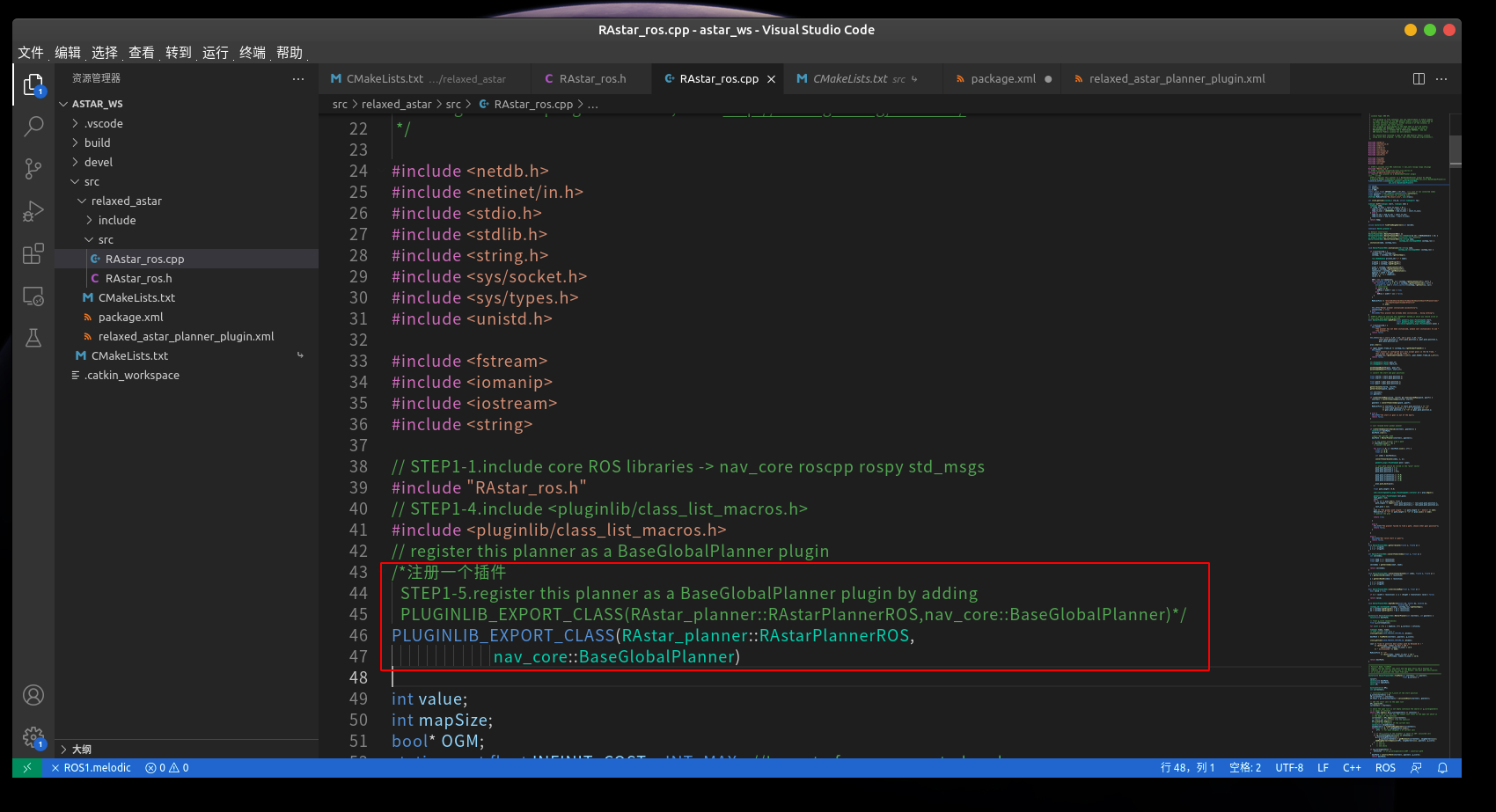
// register this planner as a BaseGlobalPlanner plugin
/*注册一个插件
STEP1-5.register this planner as a BaseGlobalPlanner plugin by adding
PLUGINLIB_EXPORT_CLASS(RAstar_planner::RAstarPlannerROS,nav_core::BaseGlobalPlanner)*/
PLUGINLIB_EXPORT_CLASS(RAstar_planner::RAstarPlannerROS,
nav_core::BaseGlobalPlanner)
int value;
int mapSize;
bool* OGM;
static const float INFINIT_COST = INT_MAX; //!< cost of non connected nodes
float infinity = std::numeric_limits<float>::infinity();
float tBreak; // coefficient for breaking ties
ofstream MyExcelFile("RA_result.xlsx", ios::trunc);
int clock_gettime(clockid_t clk_id, struct timespect* tp);
timespec diff(timespec start, timespec end) {
timespec temp;
if ((end.tv_nsec - start.tv_nsec) < 0) {
temp.tv_sec = end.tv_sec - start.tv_sec - 1;
temp.tv_nsec = 1000000000 + end.tv_nsec - start.tv_nsec;
} else {
temp.tv_sec = end.tv_sec - start.tv_sec;
temp.tv_nsec = end.tv_nsec - start.tv_nsec;
}
return temp;
}
inline vector<int> findFreeNeighborCell(int CellID);
namespace RAstar_planner {
// Default Constructor
RAstarPlannerROS::RAstarPlannerROS() {}
RAstarPlannerROS::RAstarPlannerROS(ros::NodeHandle& nh) { ROSNodeHandle = nh; }
// STEP1-3.overriden the methods "initialize" and "makePlan"
RAstarPlannerROS::RAstarPlannerROS(std::string name,
costmap_2d::Costmap2DROS* costmap_ros) {
initialize(name, costmap_ros);
}
void RAstarPlannerROS::initialize(std::string name,
costmap_2d::Costmap2DROS* costmap_ros) {
if (!initialized_) {
costmap_ros_ = costmap_ros;
costmap_ = costmap_ros_->getCostmap();
ros::NodeHandle private_nh("~/" + name);
originX = costmap_->getOriginX();
originY = costmap_->getOriginY();
width = costmap_->getSizeInCellsX();
height = costmap_->getSizeInCellsY();
resolution = costmap_->getResolution();
mapSize = width * height;
tBreak = 1 + 1 / (mapSize);
value = 0;
OGM = new bool[mapSize];
for (unsigned int iy = 0; iy < costmap_->getSizeInCellsY(); iy++) {
for (unsigned int ix = 0; ix < costmap_->getSizeInCellsX(); ix++) {
unsigned int cost = static_cast<int>(costmap_->getCost(ix, iy));
// cout<<cost;
if (cost == 0)
OGM[iy * width + ix] = true;
else
OGM[iy * width + ix] = false;
}
}
MyExcelFile << "StartID\tStartX\tStartY\tGoalID\tGoalX\tGoalY\tPlannertime("
"ms)\tpathLength\tnumberOfCells\t"
<< endl;
ROS_INFO("RAstar planner initialized successfully");
initialized_ = true;
} else
ROS_WARN("This planner has already been initialized... doing nothing");
}
// STEP1-3.1Here we override the "makePlan" method,in which you should write or
// call your path planning algorithm
bool RAstarPlannerROS::makePlan(const geometry_msgs::PoseStamped& start,
const geometry_msgs::PoseStamped& goal,
std::vector<geometry_msgs::PoseStamped>& plan) {
if (!initialized_) {
ROS_ERROR(
"The planner has not been initialized, please call initialize() to use "
"the planner");
return false;
}
ROS_DEBUG("Got a start: %.2f, %.2f, and a goal: %.2f, %.2f",
start.pose.position.x, start.pose.position.y, goal.pose.position.x,
goal.pose.position.y);
plan.clear();
if (goal.header.frame_id != costmap_ros_->getGlobalFrameID()) {
ROS_ERROR(
"This planner as configured will only accept goals in the %s frame, "
"but a goal was sent in the %s frame.",
costmap_ros_->getGlobalFrameID().c_str(), goal.header.frame_id.c_str());
return false;
}
tf::Stamped<tf::Pose> goal_tf;
tf::Stamped<tf::Pose> start_tf;
poseStampedMsgToTF(goal, goal_tf);
poseStampedMsgToTF(start, start_tf);
// convert the start and goal positions
float startX = start.pose.position.x;
float startY = start.pose.position.y;
float goalX = goal.pose.position.x;
float goalY = goal.pose.position.y;
getCorrdinate(startX, startY);
getCorrdinate(goalX, goalY);
int startCell;
int goalCell;
if (isCellInsideMap(startX, startY) && isCellInsideMap(goalX, goalY)) {
startCell = convertToCellIndex(startX, startY);
goalCell = convertToCellIndex(goalX, goalY);
MyExcelFile << startCell << "\t" << start.pose.position.x << "\t"
<< start.pose.position.y << "\t" << goalCell << "\t"
<< goal.pose.position.x << "\t" << goal.pose.position.y;
} else {
ROS_WARN("the start or goal is out of the map");
return false;
}
/////////////////////////////////////////////////////////
// call relaxed Astar global planner
if (isStartAndGoalCellsValid(startCell, goalCell)) {
vector<int> bestPath;
bestPath.clear();
//两个参数为起始点和终点
bestPath = RAstarPlanner(startCell, goalCell);
// if the global planner find a path
if (bestPath.size() > 0) {
// convert the path
for (int i = 0; i < bestPath.size(); i++) {
float x = 0.0;
float y = 0.0;
int index = bestPath[i];
convertToCoordinate(index, x, y);
geometry_msgs::PoseStamped pose = goal;
// your path should be stored in the "plan" vector
pose.pose.position.x = x;
pose.pose.position.y = y;
pose.pose.position.z = 0.0;
pose.pose.orientation.x = 0.0;
pose.pose.orientation.y = 0.0;
pose.pose.orientation.z = 0.0;
pose.pose.orientation.w = 1.0;
plan.push_back(pose);
}
float path_length = 0.0;
std::vector<geometry_msgs::PoseStamped>::iterator it = plan.begin();
geometry_msgs::PoseStamped last_pose;
last_pose = *it;
it++;
for (; it != plan.end(); ++it) {
path_length += hypot((*it).pose.position.x - last_pose.pose.position.x,
(*it).pose.position.y - last_pose.pose.position.y);
last_pose = *it;
}
cout << "The global path length: " << path_length << " meters" << endl;
MyExcelFile << "\t" << path_length << "\t" << plan.size() << endl;
// publish the plan
return true;
}
else {
ROS_WARN("The planner failed to find a path, choose other goal position");
return false;
}
}
else {
ROS_WARN("Not valid start or goal");
return false;
}
}
void RAstarPlannerROS::getCorrdinate(float& x, float& y) {
x = x - originX;
y = y - originY;
}
int RAstarPlannerROS::convertToCellIndex(float x, float y) {
int cellIndex;
float newX = x / resolution;
float newY = y / resolution;
cellIndex = getCellIndex(newY, newX);
return cellIndex;
}
void RAstarPlannerROS::convertToCoordinate(int index, float& x, float& y) {
x = getCellColID(index) * resolution;
y = getCellRowID(index) * resolution;
x = x + originX;
y = y + originY;
}
bool RAstarPlannerROS::isCellInsideMap(float x, float y) {
bool valid = true;
if (x > (width * resolution) || y > (height * resolution)) valid = false;
return valid;
}
void RAstarPlannerROS::mapToWorld(double mx, double my, double& wx,
double& wy) {
costmap_2d::Costmap2D* costmap = costmap_ros_->getCostmap();
wx = costmap->getOriginX() + mx * resolution;
wy = costmap->getOriginY() + my * resolution;
}
vector<int> RAstarPlannerROS::RAstarPlanner(int startCell, int goalCell) {
vector<int> bestPath;
// float g_score [mapSize][2];
float g_score[mapSize];
for (uint i = 0; i < mapSize; i++) g_score[i] = infinity;
timespec time1, time2;
/* take current time here */
clock_gettime(CLOCK_PROCESS_CPUTIME_ID, &time1);
bestPath = findPath(startCell, goalCell, g_score);
clock_gettime(CLOCK_PROCESS_CPUTIME_ID, &time2);
cout << "time to generate best global path by Relaxed A* = "
<< (diff(time1, time2).tv_sec) * 1e3 +
(diff(time1, time2).tv_nsec) * 1e-6
<< " microseconds" << endl;
MyExcelFile << "\t"
<< (diff(time1, time2).tv_sec) * 1e3 +
(diff(time1, time2).tv_nsec) * 1e-6;
return bestPath;
}
/*******************************************************************************/
// Function Name: findPath
// Inputs: the map layout, the start and the goal Cells and a boolean to
// indicate if we will use break ties or not Output: the best path Description:
// it is used to generate the robot free path
/*********************************************************************************/
vector<int> RAstarPlannerROS::findPath(int startCell, int goalCell,
float g_score[]) {
value++;
vector<int> bestPath;
vector<int> emptyPath;
cells CP;
multiset<cells> OPL;
int currentCell;
// calculate g_score and f_score of the start position
g_score[startCell] = 0;
CP.currentCell = startCell;
CP.fCost = g_score[startCell] + calculateHCost(startCell, goalCell);
// add the start cell to the open list
OPL.insert(CP);
currentCell = startCell;
// while the open list is not empty continuie the search or g_score(goalCell)
// is equal to infinity
while (!OPL.empty() && g_score[goalCell] == infinity) {
// choose the cell that has the lowest cost fCost in the open set which is
// the begin of the multiset
currentCell = OPL.begin()->currentCell;
// remove the currentCell from the openList
OPL.erase(OPL.begin());
// search the neighbors of the current Cell
vector<int> neighborCells;
neighborCells = findFreeNeighborCell(currentCell);
for (uint i = 0; i < neighborCells.size();
i++) // for each neighbor v of current cell
{
// if the g_score of the neighbor is equal to INF: unvisited cell
if (g_score[neighborCells[i]] == infinity) {
g_score[neighborCells[i]] =
g_score[currentCell] + getMoveCost(currentCell, neighborCells[i]);
addNeighborCellToOpenList(OPL, neighborCells[i], goalCell, g_score);
} // end if
} // end for
} // end while
if (g_score[goalCell] !=
infinity) // if g_score(goalcell)==INF : construct path
{
bestPath = constructPath(startCell, goalCell, g_score);
return bestPath;
} else {
cout << "Failure to find a path !" << endl;
return emptyPath;
}
}
/*******************************************************************************/
// Function Name: constructPath
// Inputs: the start and the goal Cells
// Output: the best path
// Description: it is used to construct the robot path
/*********************************************************************************/
vector<int> RAstarPlannerROS::constructPath(int startCell, int goalCell,
float g_score[]) {
vector<int> bestPath;
vector<int> path;
path.insert(path.begin() + bestPath.size(), goalCell);
int currentCell = goalCell;
while (currentCell != startCell) {
vector<int> neighborCells;
neighborCells = findFreeNeighborCell(currentCell);
vector<float> gScoresNeighbors;
for (uint i = 0; i < neighborCells.size(); i++)
gScoresNeighbors.push_back(g_score[neighborCells[i]]);
int posMinGScore =
distance(gScoresNeighbors.begin(),
min_element(gScoresNeighbors.begin(), gScoresNeighbors.end()));
currentCell = neighborCells[posMinGScore];
// insert the neighbor in the path
path.insert(path.begin() + path.size(), currentCell);
}
for (uint i = 0; i < path.size(); i++)
bestPath.insert(bestPath.begin() + bestPath.size(),
path[path.size() - (i + 1)]);
return bestPath;
}
/*******************************************************************************/
// Function Name: calculateHCost
// Inputs:the cellID and the goalCell
// Output: the distance between the current cell and the goal cell
// Description: it is used to calculate the hCost
/*********************************************************************************/
/*
float RAstarPlannerROS::calculateHCost(int cellID, int goalCell)
{
int x1=getCellRowID(goalCell);
int y1=getCellColID(goalCell);
int x2=getCellRowID(cellID);
int y2=getCellColID(cellID);
//if(getNeighborNumber()==4)
//The diagonal shortcut distance between two grid points (x1,y1) and (x2,y2)
is:
// return min(abs(x1-x2),abs(y1-y2))*sqrt(2) +
max(abs(x1-x2),abs(y1-y2))-min(abs(x1-x2),abs(y1-y2));
//else
//manhatten distance for 8 neighbor
return abs(x1-x2)+abs(y1-y2);
}
*/
/*******************************************************************************/
// Function Name: addNeighborCellToOpenList
// Inputs: the open list, the neighbors Cell, the g_score matrix, the goal cell
// Output:
// Description: it is used to add a neighbor Cell to the open list
/*********************************************************************************/
void RAstarPlannerROS::addNeighborCellToOpenList(multiset<cells>& OPL,
int neighborCell, int goalCell,
float g_score[]) {
cells CP;
CP.currentCell = neighborCell; // insert the neighbor cell
CP.fCost = g_score[neighborCell] + calculateHCost(neighborCell, goalCell);
OPL.insert(CP);
// multiset<cells>::iterator it = OPL.lower_bound(CP);
// multiset<cells>::iterator it = OPL.upper_bound(CP);
// OPL.insert( it, CP );
}
/*******************************************************************************
* Function Name: findFreeNeighborCell
* Inputs: the row and columun of the current Cell
* Output: a vector of free neighbor cells of the current cell
* Description:it is used to find the free neighbors Cells of a the current Cell
*in the grid Check Status: Checked by Anis, Imen and Sahar
*********************************************************************************/
vector<int> RAstarPlannerROS::findFreeNeighborCell(int CellID) {
int rowID = getCellRowID(CellID);
int colID = getCellColID(CellID);
int neighborIndex;
vector<int> freeNeighborCells;
for (int i = -1; i <= 1; i++)
for (int j = -1; j <= 1; j++) {
// check whether the index is valid
if ((rowID + i >= 0) && (rowID + i < height) && (colID + j >= 0) &&
(colID + j < width) && (!(i == 0 && j == 0))) {
neighborIndex = getCellIndex(rowID + i, colID + j);
if (isFree(neighborIndex)) freeNeighborCells.push_back(neighborIndex);
}
}
return freeNeighborCells;
}
/*******************************************************************************/
// Function Name: isStartAndGoalCellsValid
// Inputs: the start and Goal cells
// Output: true if the start and the goal cells are valid
// Description: check if the start and goal cells are valid
/*********************************************************************************/
bool RAstarPlannerROS::isStartAndGoalCellsValid(int startCell, int goalCell) {
bool isvalid = true;
bool isFreeStartCell = isFree(startCell);
bool isFreeGoalCell = isFree(goalCell);
if (startCell == goalCell) {
// cout << "The Start and the Goal cells are the same..." << endl;
isvalid = false;
} else {
if (!isFreeStartCell && !isFreeGoalCell) {
// cout << "The start and the goal cells are obstacle positions..." <<
// endl;
isvalid = false;
} else {
if (!isFreeStartCell) {
// cout << "The start is an obstacle..." << endl;
isvalid = false;
} else {
if (!isFreeGoalCell) {
// cout << "The goal cell is an obstacle..." << endl;
isvalid = false;
} else {
if (findFreeNeighborCell(goalCell).size() == 0) {
// cout << "The goal cell is encountred by obstacles... "<< endl;
isvalid = false;
} else {
if (findFreeNeighborCell(startCell).size() == 0) {
// cout << "The start cell is encountred by obstacles... "<< endl;
isvalid = false;
}
}
}
}
}
}
return isvalid;
}
float RAstarPlannerROS::getMoveCost(int i1, int j1, int i2, int j2) {
float moveCost = INFINIT_COST; // start cost with maximum value. Change it to
// real cost of cells are connected
// if cell2(i2,j2) exists in the diagonal of cell1(i1,j1)
if ((j2 == j1 + 1 && i2 == i1 + 1) || (i2 == i1 - 1 && j2 == j1 + 1) ||
(i2 == i1 - 1 && j2 == j1 - 1) || (j2 == j1 - 1 && i2 == i1 + 1)) {
// moveCost = DIAGONAL_MOVE_COST;
moveCost = 1.4;
}
// if cell 2(i2,j2) exists in the horizontal or vertical line with
// cell1(i1,j1)
else {
if ((j2 == j1 && i2 == i1 - 1) || (i2 == i1 && j2 == j1 - 1) ||
(i2 == i1 + 1 && j2 == j1) || (i1 == i2 && j2 == j1 + 1)) {
// moveCost = MOVE_COST;
moveCost = 1;
}
}
return moveCost;
}
float RAstarPlannerROS::getMoveCost(int CellID1, int CellID2) {
int i1 = 0, i2 = 0, j1 = 0, j2 = 0;
i1 = getCellRowID(CellID1);
j1 = getCellColID(CellID1);
i2 = getCellRowID(CellID2);
j2 = getCellColID(CellID2);
return getMoveCost(i1, j1, i2, j2);
}
// verify if the cell(i,j) is free
bool RAstarPlannerROS::isFree(int i, int j) {
int CellID = getCellIndex(i, j);
return OGM[CellID];
}
// verify if the cell(i,j) is free
bool RAstarPlannerROS::isFree(int CellID) { return OGM[CellID]; }
}; // namespace RAstar_planner
bool operator<(cells const& c1, cells const& c2) { return c1.fCost < c2.fCost; }
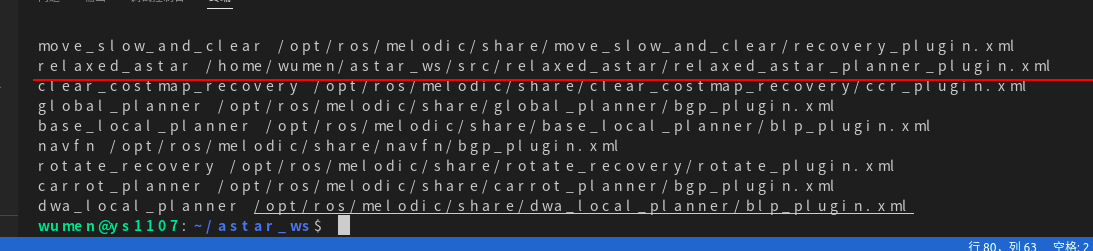
已构建插件库并导出插件
CMakeLists.txt
cmake_minimum_required(VERSION 3.0.2)
project(relaxed_astar)
find_package(catkin REQUIRED COMPONENTS
nav_core
roscpp
rospy
std_msgs
actionlib
actionlib_msgs
)
catkin_package()
include_directories(
# include
${catkin_INCLUDE_DIRS}
)
add_library(relaxed_astar_lib
src/RAstar_ros.cpp
)
package.xml
<?xml version="1.0"?>
<package format="2">
<buildtool_depend>catkin</buildtool_depend>
<build_depend>nav_core</build_depend>
<build_depend>roscpp</build_depend>
<build_depend>rospy</build_depend>
<build_depend>std_msgs</build_depend>
<build_depend>actionlib</build_depend>
<build_depend>actionlib_msgs</build_depend>
<build_export_depend>nav_core</build_export_depend>
<build_export_depend>roscpp</build_export_depend>
<build_export_depend>rospy</build_export_depend>
<build_export_depend>std_msgs</build_export_depend>
<build_export_depend>actionlib</build_export_depend>
<build_export_depend>actionlib_msgs</build_export_depend>
<exec_depend>nav_core</exec_depend>
<exec_depend>roscpp</exec_depend>
<exec_depend>rospy</exec_depend>
<exec_depend>std_msgs</exec_depend>
<exec_depend>actionlib</exec_depend>
<exec_depend>actionlib_msgs</exec_depend>
<!-- The export tag contains other, unspecified, tags -->
<export>
<!-- Other tools can request additional information be placed here -->
<!--STEP2-3.registering plugin with ROS package system-->
<nav_core plugin="${prefix}/relaxed_astar_planner_plugin.xml" />
</export>
</package>
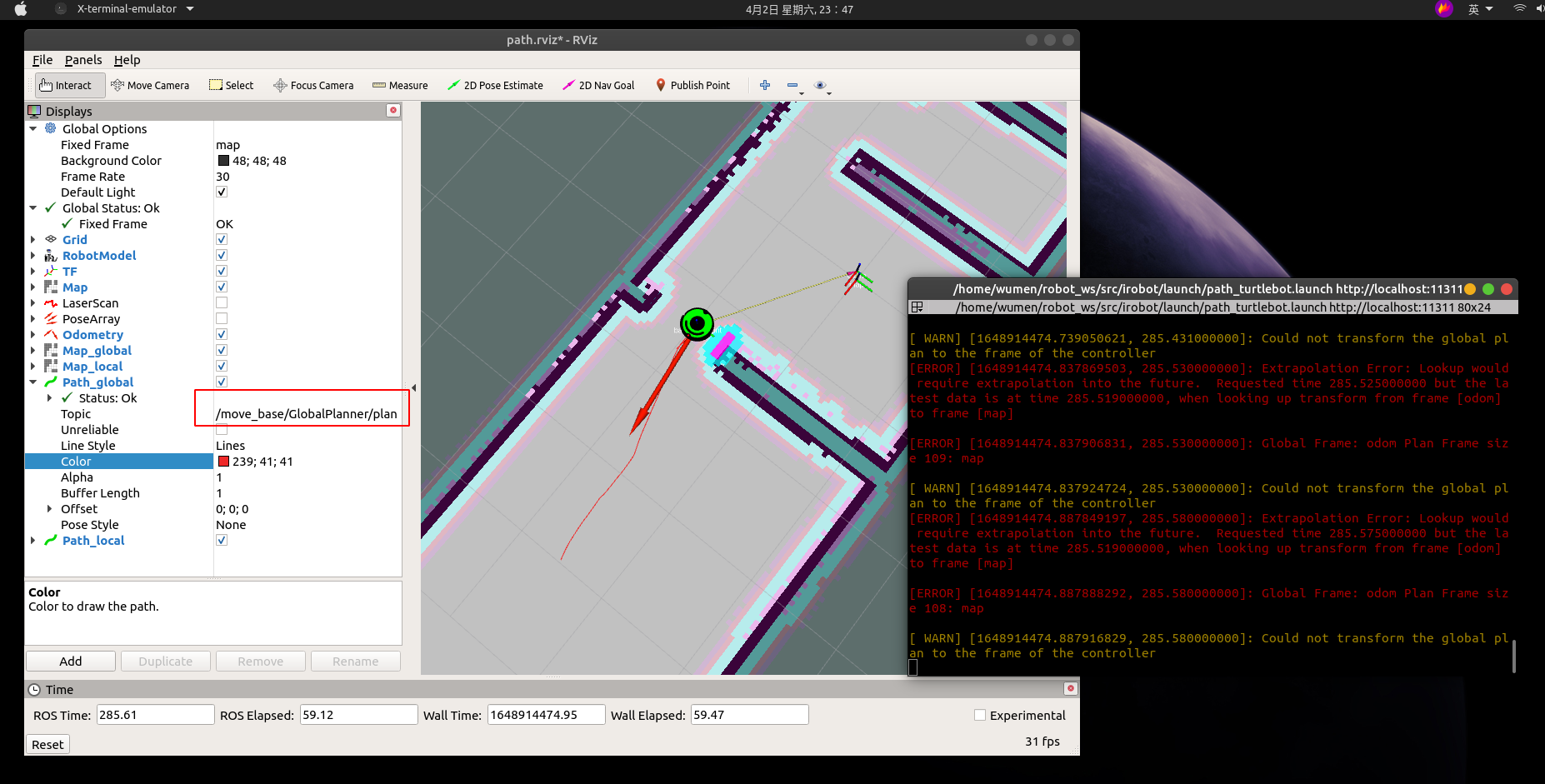
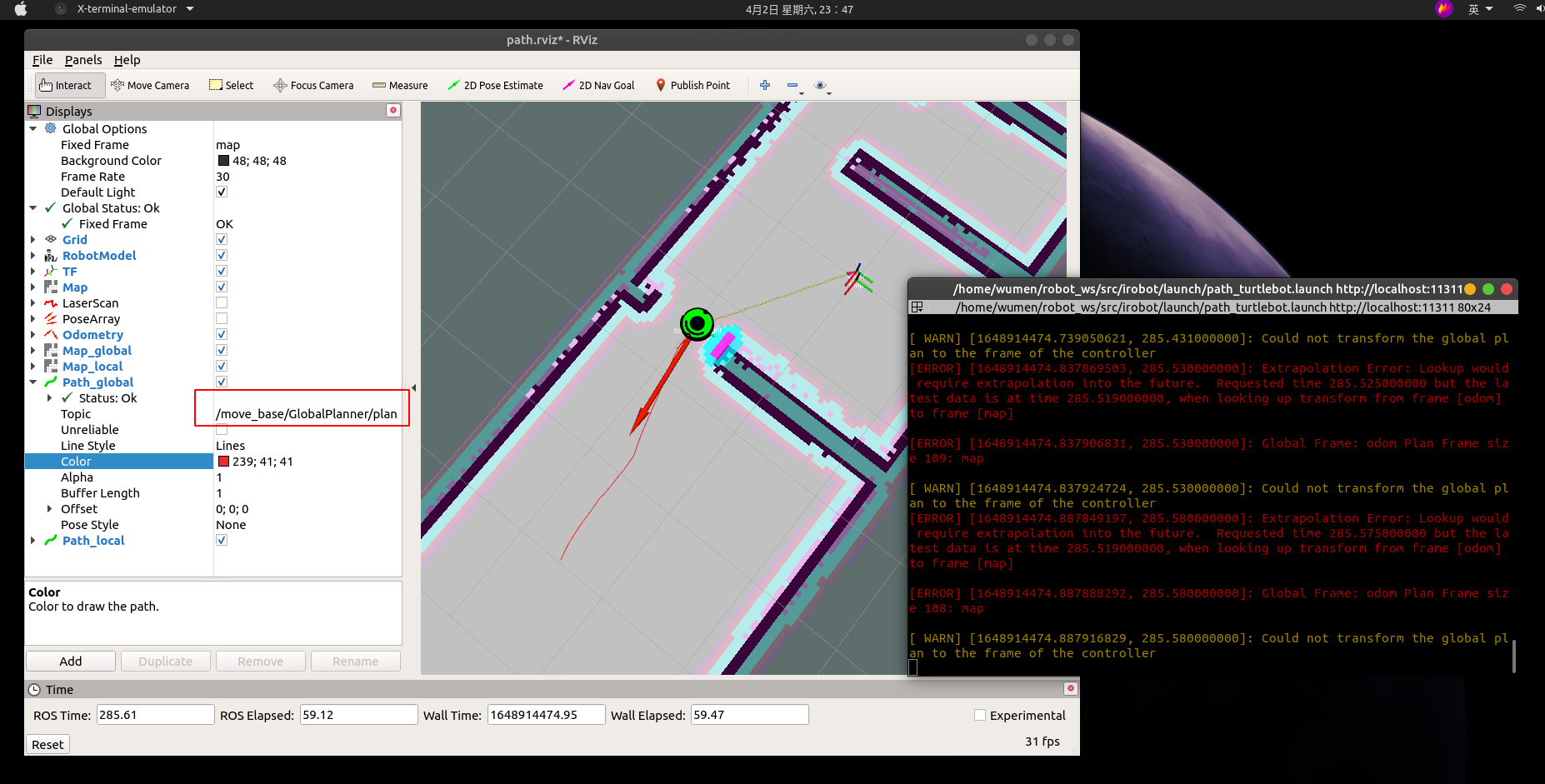
构建插件库成功但未集成到ROS工具链
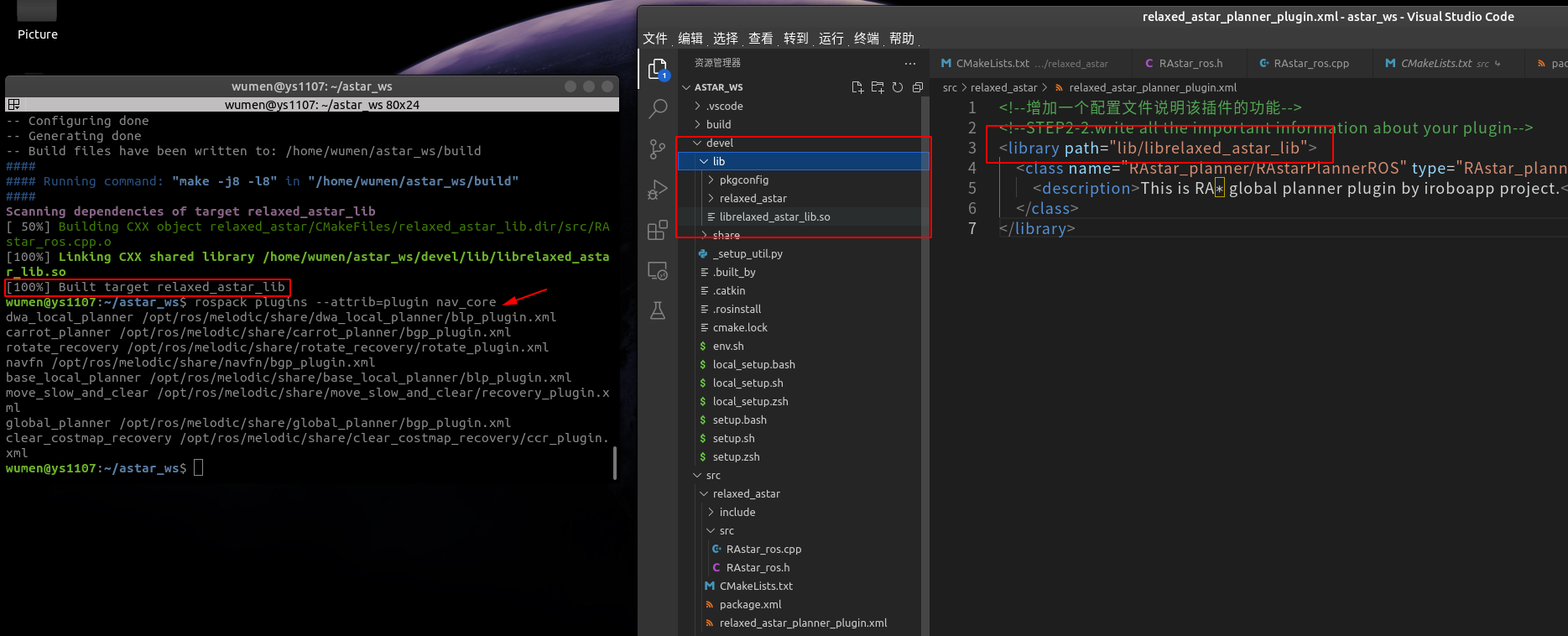
relaxed_astar_planner_plugin.xml
<!--增加一个配置文件说明该插件的功能-->
<!--STEP2-2.write all the important information about your plugin-->
<library path="lib/librelaxed_astar_lib">
<class name="RAstar_planner/RAstarPlannerROS" type="RAstar_planner::RAstarPlannerROS" base_class_type="nav_core::BaseGlobalPlanner">
<description>This is RA∗ global planner plugin by iroboapp project.</description>
</class>
</library>