@小鱼 创建和使用插件(C++)待校准
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
2318025212 发布的最新帖子
-
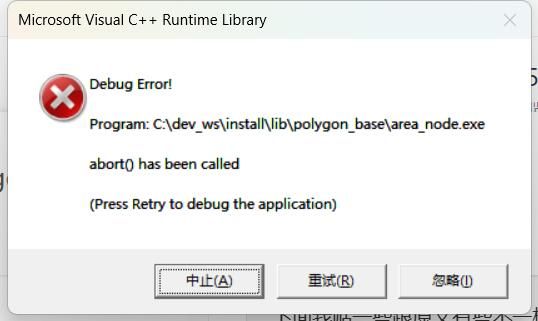
colcon build --merge-install --packages-select polygon_base polygon_plugins成功,但是ros2 run polygon_base area_node报错发布在 ROS2
我是Windows11操作系统下运行foxy发行版,前序步骤都按ROS2创建和使用插件(C
++)进行
下面我贴一些跟原文有些不一样的地方:
1.先决条件那里我pluginlib忽略掉
2. 2.3CMake插件声明时,发现CMakeList文件内已含有add_library和install,补充了一行pluginlib_export_plugin_description_file(polygon_base plugins.xml)
后续全部一致操作,可以确定 因为跟着做了两遍都是在run的时候弹窗