@小鱼  这个是原始地图
这个是原始地图
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
2496480233 发布的帖子
-
RE: navi导航停车抱死发布在 FishBot机器人
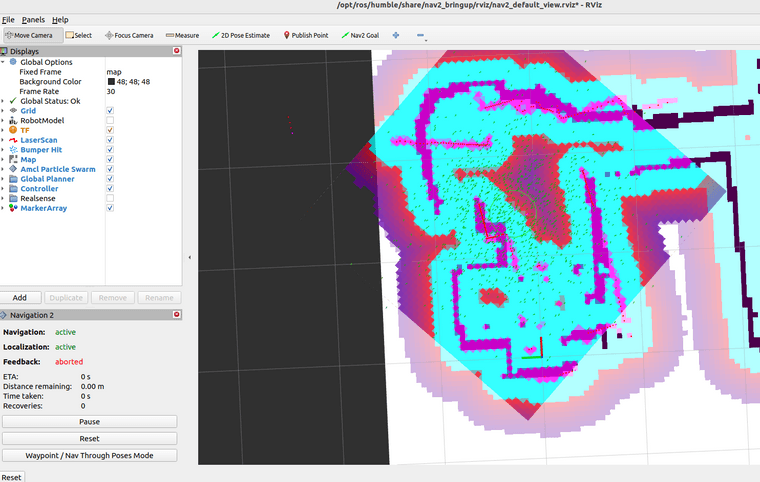
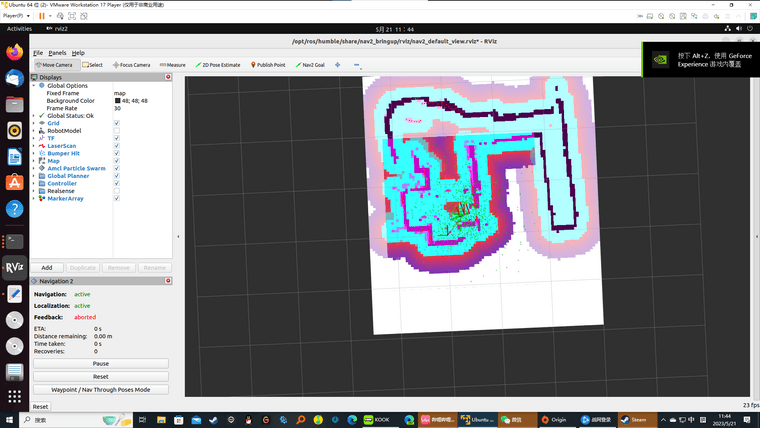
navi2 截图
[rviz2-2] Start navigation [rviz2-2] [INFO] [1684640655.389216028] [rviz2]: NavigateToPose will be called using the BT Navigator's default behavior tree. [component_container_isolated-1] [INFO] [1684640655.391752848] [bt_navigator]: Begin navigating from current location to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640655.393030124] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640655.393238111] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640655.393580970] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640655.413169215] [global_costmap.global_costmap]: Received request to clear entirely the global_costmap [rviz2-2] [INFO] [1684640655.502392748] [rviz2]: Message Filter dropping message: frame 'odom' at time 1684640646.329 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [rviz2-2] [INFO] [1684640656.028722875] [rviz2]: Message Filter dropping message: frame 'odom' at time 1684640646.942 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [rviz2-2] [INFO] [1684640656.034835386] [rviz2]: Message Filter dropping message: frame 'odom' at time 1684640647.024 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [rviz2-2] [INFO] [1684640656.278022603] [rviz2]: Message Filter dropping message: frame 'laser_frame' at time 1684640647.276 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [rviz2-2] [INFO] [1684640656.402100352] [rviz2]: Message Filter dropping message: frame 'odom' at time 1684640647.328 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [WARN] [1684640656.409390242] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640656.409423315] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640656.409431755] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640656.422599214] [local_costmap.local_costmap]: Received request to clear entirely the local_costmap [component_container_isolated-1] [INFO] [1684640656.423534058] [global_costmap.global_costmap]: Received request to clear entirely the global_costmap [rviz2-2] [INFO] [1684640656.527217694] [rviz2]: Message Filter dropping message: frame 'odom' at time 1684640647.458 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [rviz2-2] [INFO] [1684640656.528284948] [rviz2]: Message Filter dropping message: frame 'laser_frame' at time 1684640647.401 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [rviz2-2] [INFO] [1684640656.528709832] [rviz2]: Message Filter dropping message: frame 'laser_frame' at time 1684640647.526 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [rviz2-2] [INFO] [1684640656.651990013] [rviz2]: Message Filter dropping message: frame 'odom' at time 1684640647.635 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [rviz2-2] [INFO] [1684640656.653736851] [rviz2]: Message Filter dropping message: frame 'laser_frame' at time 1684640647.651 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [rviz2-2] [INFO] [1684640656.777409653] [rviz2]: Message Filter dropping message: frame 'laser_frame' at time 1684640647.776 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [rviz2-2] [INFO] [1684640657.027232558] [rviz2]: Message Filter dropping message: frame 'laser_frame' at time 1684640647.901 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [rviz2-2] [INFO] [1684640657.027753967] [rviz2]: Message Filter dropping message: frame 'laser_frame' at time 1684640648.026 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [WARN] [1684640657.401699353] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640657.401763568] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640657.401772909] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640657.412444882] [global_costmap.global_costmap]: Received request to clear entirely the global_costmap [component_container_isolated-1] [WARN] [1684640658.409614719] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640658.409684623] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640658.409696544] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640658.431874735] [behavior_server]: Running spin [component_container_isolated-1] [INFO] [1684640658.431968061] [behavior_server]: Turning 1.57 for spin behavior. [component_container_isolated-1] [WARN] [1684640658.532312442] [behavior_server]: Collision Ahead - Exiting Spin [component_container_isolated-1] [WARN] [1684640658.532346604] [behavior_server]: spin failed [component_container_isolated-1] [WARN] [1684640658.532356415] [behavior_server]: [spin] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640658.560209948] [behavior_server]: Running wait [component_container_isolated-1] [INFO] [1684640663.561947939] [behavior_server]: wait completed successfully [component_container_isolated-1] [WARN] [1684640663.596017219] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640663.596061031] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640663.596068862] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640663.612621966] [global_costmap.global_costmap]: Received request to clear entirely the global_costmap [component_container_isolated-1] [WARN] [1684640664.409307189] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640664.409351021] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640664.409359701] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640664.422471260] [behavior_server]: Running backup [component_container_isolated-1] [WARN] [1684640664.422703952] [behavior_server]: Collision Ahead - Exiting DriveOnHeading [component_container_isolated-1] [WARN] [1684640664.422717213] [behavior_server]: backup failed [component_container_isolated-1] [WARN] [1684640664.422723973] [behavior_server]: [backup] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640664.433902120] [local_costmap.local_costmap]: Received request to clear entirely the local_costmap [component_container_isolated-1] [INFO] [1684640664.434469418] [global_costmap.global_costmap]: Received request to clear entirely the global_costmap [component_container_isolated-1] [WARN] [1684640665.408203677] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640665.408253249] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640665.408262210] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640665.422219073] [global_costmap.global_costmap]: Received request to clear entirely the global_costmap [component_container_isolated-1] [WARN] [1684640666.405216910] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640666.405269292] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640666.405279032] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640666.417142461] [behavior_server]: Running spin [component_container_isolated-1] [INFO] [1684640666.417216425] [behavior_server]: Turning 1.57 for spin behavior. [component_container_isolated-1] [WARN] [1684640666.517740731] [behavior_server]: Collision Ahead - Exiting Spin [component_container_isolated-1] [WARN] [1684640666.517776583] [behavior_server]: spin failed [component_container_isolated-1] [WARN] [1684640666.517784163] [behavior_server]: [spin] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640666.542622255] [behavior_server]: Running wait [component_container_isolated-1] [INFO] [1684640671.543672781] [behavior_server]: wait completed successfully [component_container_isolated-1] [WARN] [1684640671.577536464] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640671.577600906] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640671.577608957] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640671.592772954] [global_costmap.global_costmap]: Received request to clear entirely the global_costmap [component_container_isolated-1] [WARN] [1684640672.408980348] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640672.409025140] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640672.409035010] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640672.431500145] [behavior_server]: Running backup [component_container_isolated-1] [WARN] [1684640672.431690360] [behavior_server]: Collision Ahead - Exiting DriveOnHeading [component_container_isolated-1] [WARN] [1684640672.431702690] [behavior_server]: backup failed [component_container_isolated-1] [WARN] [1684640672.431708490] [behavior_server]: [backup] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640672.452615442] [local_costmap.local_costmap]: Received request to clear entirely the local_costmap [component_container_isolated-1] [INFO] [1684640672.453219799] [global_costmap.global_costmap]: Received request to clear entirely the global_costmap [component_container_isolated-1] [WARN] [1684640673.406357526] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640673.406403647] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640673.406412347] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640673.422510530] [global_costmap.global_costmap]: Received request to clear entirely the global_costmap [component_container_isolated-1] [WARN] [1684640674.406706805] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640674.406751966] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640674.406760327] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640674.426272357] [behavior_server]: Running spin [component_container_isolated-1] [INFO] [1684640674.426435611] [behavior_server]: Turning 1.57 for spin behavior. [component_container_isolated-1] [WARN] [1684640674.526948197] [behavior_server]: Collision Ahead - Exiting Spin [component_container_isolated-1] [WARN] [1684640674.526984018] [behavior_server]: spin failed [component_container_isolated-1] [WARN] [1684640674.526991238] [behavior_server]: [spin] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640674.565445574] [behavior_server]: Running wait [component_container_isolated-1] [INFO] [1684640679.566206836] [behavior_server]: wait completed successfully [component_container_isolated-1] [WARN] [1684640679.602154863] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640679.602221363] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640679.602232774] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640679.612462329] [global_costmap.global_costmap]: Received request to clear entirely the global_costmap [component_container_isolated-1] [WARN] [1684640680.409568476] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640680.409622657] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640680.409631517] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [ERROR] [1684640680.432466604] [bt_navigator]: Goal failed [component_container_isolated-1] [WARN] [1684640680.432512194] [bt_navigator]: [navigate_to_pose] [ActionServer] Aborting handle.终端输出
-
RE: navi导航停车抱死发布在 FishBot机器人
@2496480233
起先在安装依赖git clone https://github.com/fishros/fishbot.git -b v1.0.0 --depth=1 cd fishbot rosdep install --from-paths src --ignore-src -y -r # 安装依赖执行这步时出现错误
ERROR: the following packages/stacks could not have their rosdep keys resolved to system dependencies: fishbot_description: Cannot locate rosdep definition for [ament_python] Continuing to install resolvable dependencies... #All required rosdeps installed successfully然后在 colcon build报错
Starting >>> fishbot_bringup Starting >>> fishbot_cartographer Finished <<< fishbot_cartographer [0.12s] Starting >>> fishbot_description Finished <<< fishbot_bringup [0.31s] Starting >>> fishbot_interfaces --- stderr: fishbot_interfaces CMake Error at /opt/ros/humble/share/rosidl_cmake/cmake/rosidl_generate_interfaces.cmake:240 (list): list index: 1 out of range (-1, 0) Call Stack (most recent call first): CMakeLists.txt:29 (rosidl_generate_interfaces) CMake Error at /opt/ros/humble/share/rosidl_generator_c/cmake/rosidl_generator_c_generate_interfaces.cmake:69 (message): Target dependency '/fishbot/build/fishbot_interfaces/rosidl_adapter/fishbot_interfaces/srv/FishBotConfig.idl' does not exist Call Stack (most recent call first): /opt/ros/humble/share/ament_cmake_core/cmake/core/ament_execute_extensions.cmake:48 (include) /opt/ros/humble/share/rosidl_cmake/cmake/rosidl_generate_interfaces.cmake:286 (ament_execute_extensions) CMakeLists.txt:29 (rosidl_generate_interfaces) --- Failed <<< fishbot_interfaces [0.30s, exited with code 1] Aborted <<< fishbot_description [0.63s] Summary: 2 packages finished [0.89s] 1 package failed: fishbot_interfaces 1 package aborted: fishbot_description 2 packages had stderr output: fishbot_description fishbot_interfaces 1 package not processed后续在src文件夹中加入了https://github.com/ament/ament_lint中的文件 虽然colcon buitld仍然报错 但是没有影响后续运行
之后在执行下列指令后source install/setup.bash ros2 launch fishbot_navigation2 navigation2.launch.py标记起点和终点的数据后 小车向左转动5°左右停车 然后有蜂鸣声 执行三次向左转动5°后彻底停车 左下方navigation 2 插件显示状态为aborted 终端info输出为 goal failed
ubuntu 22.04
humble -
RE: [FishBot教程]7. FishBot-Nav2导航测试发布在 FishBot机器人
@2496480233 然后colcon build报错
Starting >>> fishbot_bringup Starting >>> fishbot_cartographer Finished <<< fishbot_cartographer [0.12s] Starting >>> fishbot_description Finished <<< fishbot_bringup [0.31s] Starting >>> fishbot_interfaces --- stderr: fishbot_interfaces CMake Error at /opt/ros/humble/share/rosidl_cmake/cmake/rosidl_generate_interfaces.cmake:240 (list): list index: 1 out of range (-1, 0) Call Stack (most recent call first): CMakeLists.txt:29 (rosidl_generate_interfaces) CMake Error at /opt/ros/humble/share/rosidl_generator_c/cmake/rosidl_generator_c_generate_interfaces.cmake:69 (message): Target dependency '/fishbot/build/fishbot_interfaces/rosidl_adapter/fishbot_interfaces/srv/FishBotConfig.idl' does not exist Call Stack (most recent call first): /opt/ros/humble/share/ament_cmake_core/cmake/core/ament_execute_extensions.cmake:48 (include) /opt/ros/humble/share/rosidl_cmake/cmake/rosidl_generate_interfaces.cmake:286 (ament_execute_extensions) CMakeLists.txt:29 (rosidl_generate_interfaces) --- Failed <<< fishbot_interfaces [0.30s, exited with code 1] Aborted <<< fishbot_description [0.63s] Summary: 2 packages finished [0.89s] 1 package failed: fishbot_interfaces 1 package aborted: fishbot_description 2 packages had stderr output: fishbot_description fishbot_interfaces 1 package not processed -
RE: [FishBot教程]7. FishBot-Nav2导航测试发布在 FishBot机器人
鱼哥 安装依赖的时候出的这个问题
ERROR: the following packages/stacks could not have their rosdep keys resolved to system dependencies: fishbot_description: Cannot locate rosdep definition for [ament_python] Continuing to install resolvable dependencies... #All required rosdeps installed successfully -
键盘控制小车不动发布在 FishBot机器人
链接小车时收到返回如下
[1684050279.548598] info | UDPv4AgentLinux.cpp | init | running... | port: 8888 [1684050279.549095] info | Root.cpp | set_verbose_level | logger setup | verbose_level: 6 [1684050280.011730] debug | UDPv4AgentLinux.cpp | recv_message | [==>> UDP <<==] | client_key: 0x00000000, len: 24, data: 0000: 80 00 00 00 00 01 10 00 58 52 43 45 01 00 01 0F 12 62 4A A7 81 00 FC 03 [1684050280.011807] info | Root.cpp | create_client | create | client_key: 0x12624AA7, session_id: 0x81 [1684050280.011842] info | SessionManager.hpp | establish_session | session established | client_key: 0x308431527, address: 192.168.0.106:53747 [1684050280.011972] debug | UDPv4AgentLinux.cpp | send_message | [** <<UDP>> **] | client_key: 0x12624AA7, len: 19, data: 0000: 81 00 00 00 04 01 0B 00 00 00 58 52 43 45 01 00 01 0F 00 [1684050280.016867] debug | UDPv4AgentLinux.cpp | recv_message | [==>> UDP <<==] | client_key: 0x12624AA7, len: 56, data: 0000: 81 80 00 00 01 07 2E 00 00 0A 00 01 01 03 00 01 1F 00 00 00 00 01 00 00 17 00 00 00 66 69 73 68 0020: 62 6F 74 5F 6D 6F 74 69 6F 6E 5F 63 6F 6E 74 72 6F 6C 00 79 00 00 73 67可以判断已经连上小车 但是执行命令
ros2 topic echo /odom收到返回
Could not determine the type for the passed topic且小车无法被键盘控制
-
RE: [FishBot教程]4.使用ROS2键盘控制FishBot发布在 FishBot机器人
@小鱼 在 [FishBot教程]4.使用ROS2键盘控制FishBot 中说:
ros2 topic echo /odom
tapapia@ubuntu:~$ ros2 topic echo /odom Could not determine the type for the passed topic还是不行

-
RE: [FishBot教程]4.使用ROS2键盘控制FishBot发布在 FishBot机器人
@小鱼 odom话题也报错了
tapapia@ubuntu:~$ ros2 topic echo /odom --field pose.pose usage: ros2 [-h] Call `ros2 <command> -h` for more detailed usage. ... ros2: error: unrecognized arguments: --field pose.pose怎么回事呢
-
RE: [FishBot教程]4.使用ROS2键盘控制FishBot发布在 FishBot机器人
鱼哥 用键盘控制小车的时候小车不动 下面是第一步执行的返回结果 是没连上小车吗 连上了的话问题可能在哪
[1684050279.548598] info | UDPv4AgentLinux.cpp | init | running... | port: 8888 [1684050279.549095] info | Root.cpp | set_verbose_level | logger setup | verbose_level: 6 [1684050280.011730] debug | UDPv4AgentLinux.cpp | recv_message | [==>> UDP <<==] | client_key: 0x00000000, len: 24, data: 0000: 80 00 00 00 00 01 10 00 58 52 43 45 01 00 01 0F 12 62 4A A7 81 00 FC 03 [1684050280.011807] info | Root.cpp | create_client | create | client_key: 0x12624AA7, session_id: 0x81 [1684050280.011842] info | SessionManager.hpp | establish_session | session established | client_key: 0x308431527, address: 192.168.0.106:53747 [1684050280.011972] debug | UDPv4AgentLinux.cpp | send_message | [** <<UDP>> **] | client_key: 0x12624AA7, len: 19, data: 0000: 81 00 00 00 04 01 0B 00 00 00 58 52 43 45 01 00 01 0F 00 [1684050280.016867] debug | UDPv4AgentLinux.cpp | recv_message | [==>> UDP <<==] | client_key: 0x12624AA7, len: 56, data: 0000: 81 80 00 00 01 07 2E 00 00 0A 00 01 01 03 00 01 1F 00 00 00 00 01 00 00 17 00 00 00 66 69 73 68 0020: 62 6F 74 5F 6D 6F 74 69 6F 6E 5F 63 6F 6E 74 72 6F 6C 00 79 00 00 73 67 -
RE: [FishBot教程] 3. 主控板固件烧录与配置发布在 FishBot机器人
@2496480233
执行命令docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:latest udp4 --port 8888 -v6返回
Unable to find image 'microros/micro-ros-agent:latest' locally latest: Pulling from microros/micro-ros-agent 345e3491a907: Retrying in 1 second 57671312ef6f: Downloading 5e9250ddb7d0: Retrying in 1 second 62f60c1e15de: Downloading e8fbc9697fb7: Waiting f80a95aef5c9: Waiting 175c1d7cad21: Waiting 42f7ef32b4b5: Waiting e2838bab4fc7: Waiting 5da5c7c89288: Waiting 8e20557a880f: Waiting 3de545ec616a: Waiting 2ddaaceb1bfe: Waiting f55d1ff72160: Waiting 13efe28462ea: Waiting be45bd35408f: Waiting 87a37534ac85: Waiting 0375d7011be6: Waiting 1a36fb817a18: Waiting 89a161fc9476: Waiting b25d5da18afd: Waiting docker: error pulling image configuration: download failed after attempts=4: error parsing HTTP 408 response body: invalid character '<' looking for beginning of value: "<html><body><h1>408 Request Time-out</h1>\nYour browser didn't send a complete request in time.\n</body></html>\n". See 'docker run --help'. -
RE: [FishBot教程] 3. 主控板固件烧录与配置发布在 FishBot机器人
鱼哥 在执行启动microros服务的时候因为我使用的ros版本在docker hub上找不到 所以我想要下载latest版本 但是一直出现这个问题
怎么办