小鱼,我发现了一个很好用的插件,叫foxglove studio,这是它的网址:https://foxglove.dev/
他可以很好的显示出录制rosbag的数据,但是只支持ros2内定的接口类型和结构,我们自定义的消息类型不显示,必须转换成.mcap格式,但是在我安装ros2 humble版mcap文件包成功后,命令行找不到mcap这个命令,卡这一步了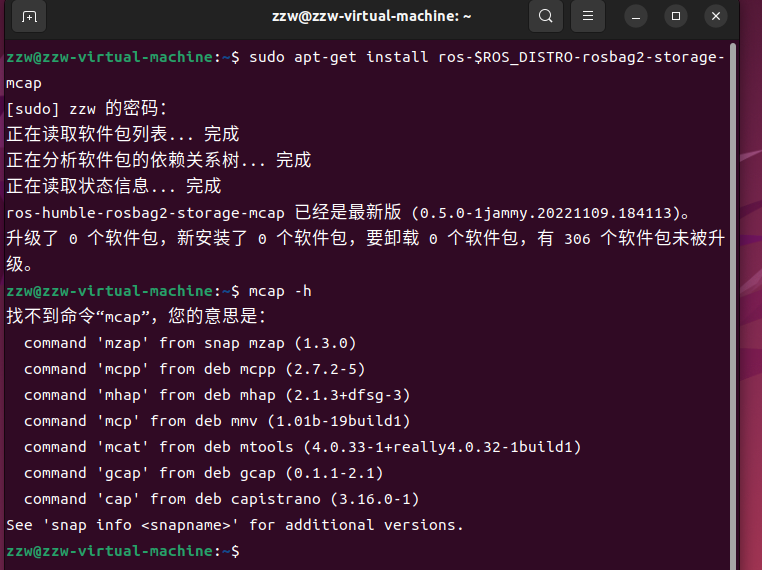 然后
然后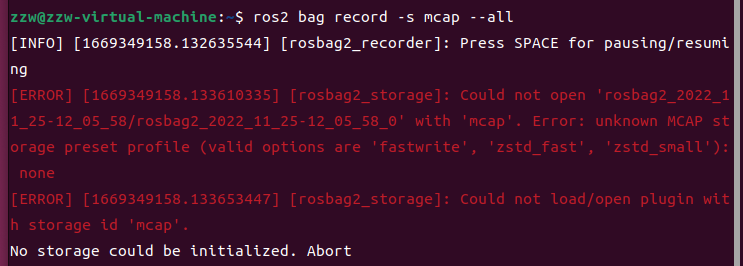
报错的信息是:
[错误][1669349158133610335][rosbag2_storage]:无法使用“mcap”打开“rosbag2_2022_11_25-12_0_58/rosbag2_22022_11_25-12_05_58_0”。错误:未知的MCAP存储预设配置文件(有效选项为“fastwrite”、“zstd_fast”和“zstd_small”):无
〔错误〕〔1669349158.133653447〕〔rosbag2_storage〕:无法加载/打开存储id为“mcap”的插件。
无法初始化任何存储。中止
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
2593576052 发布的最新帖子
-
将ros2中.bag格式文件转换成.mcap格式文件发布在 综合问题
-
求助:rosbag play播放不了发布在 综合问题
No metadata found and no storage_id specified. Can't open bag
想要打开rosbag录制的包,但是缺少元数据和ID,也不会reindex这条指令的用法
-
RE: 谁有关于ros2摄像头的教程或视频slam代码呢,给提供一下思路也行,谢谢发布在 综合问题
摄像头的我这有v4l2_camera功能包
https://blog.csdn.net/weixin_37772351/article/details/121608822
这篇博客应该有启发,但是我不懂