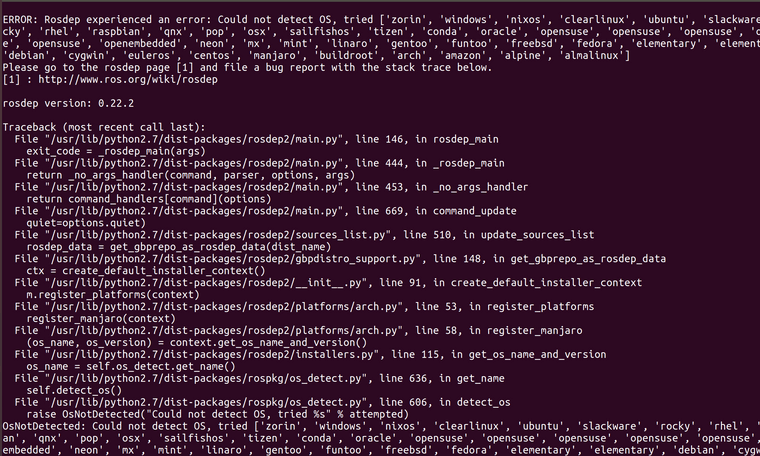
无人机px4跑gazebo仿真出错,无法在gazebo中显示出无人机模型。一个月前跑还很顺利来着,不知道是什么问题,具体错误代码如下:
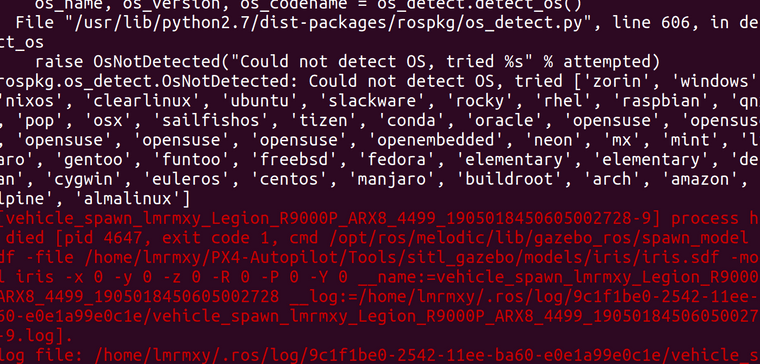
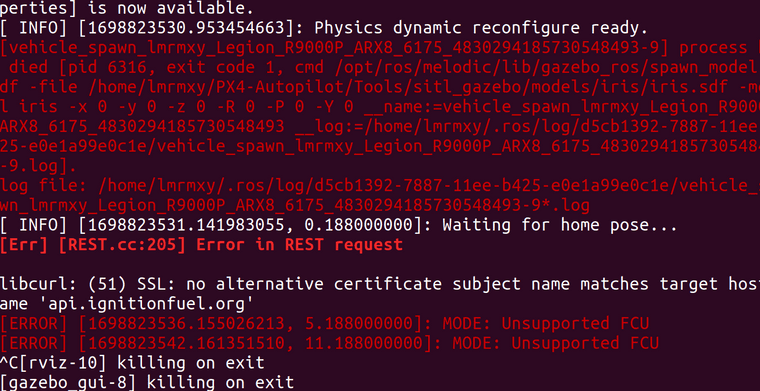
[vehicle_spawn_lmrmxy_Legion_R9000P_ARX8_6175_4830294185730548493-9] process has died [pid 6316, exit code 1, cmd /opt/ros/melodic/lib/gazebo_ros/spawn_model -sdf -file /home/lmrmxy/PX4-Autopilot/Tools/sitl_gazebo/models/iris/iris.sdf -model iris -x 0 -y 0 -z 0 -R 0 -P 0 -Y 0 __name:=vehicle_spawn_lmrmxy_Legion_R9000P_ARX8_6175_4830294185730548493 __log:=/home/lmrmxy/.ros/log/d5cb1392-7887-11ee-b425-e0e1a99e0c1e/vehicle_spawn_lmrmxy_Legion_R9000P_ARX8_6175_4830294185730548493-9.log].
log file: /home/lmrmxy/.ros/log/d5cb1392-7887-11ee-b425-e0e1a99e0c1e/vehicle_spawn_lmrmxy_Legion_R9000P_ARX8_6175_4830294185730548493-9*.log
[ INFO] [1698823531.141983055, 0.188000000]: Waiting for home pose...
[Err] [REST.cc:205] Error in REST request