在机器人上运行orb-slam2,由于机器人使用wsl+ssh远程连接,所以没有图形显示界面,从github上下载了一个不依赖Pangolin的orb跑ros,但在运行中总是出现warining:"camera_link" passed to lookupTransform argument target_frame does not exist.和Could not find a connection between 'camera_link' and 'base_link' because they are not part of the same tree.Tf has two or more unconnected trees的问题,查阅TF树发现base_link和camera_link没有连在一起,请问该如何解决,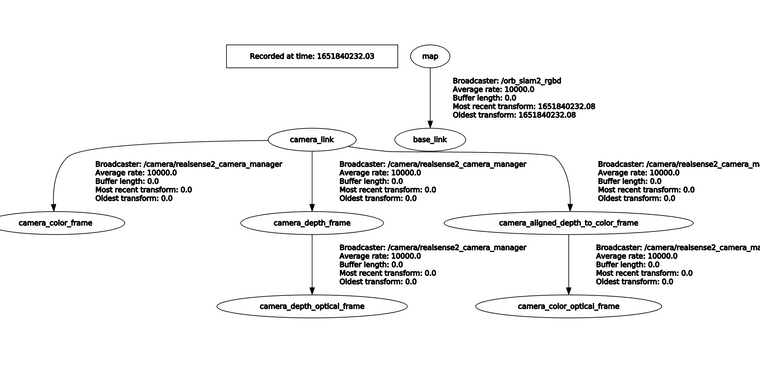
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
7
765485764 发布的最新帖子
-
ORB-SLAM2在jetson nano上运行的问题发布在 综合问题
-
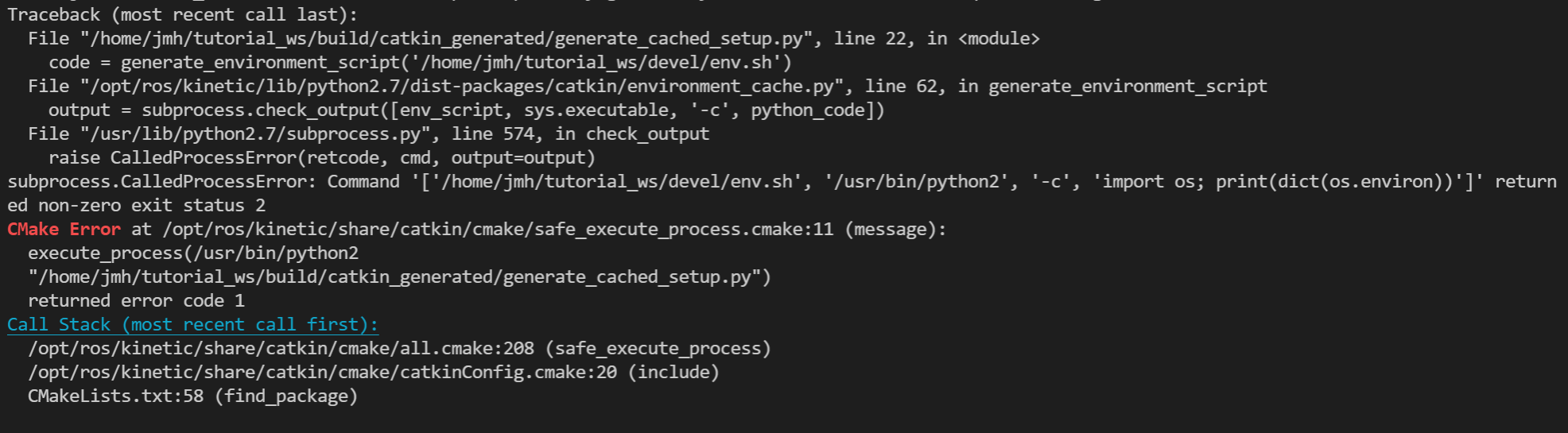
下载ROS-Academy-for-Beginners-master后catkin_make报错发布在 综合问题
我按照方法rosdep update --include-eol-distros,然后rosdepc install --from-paths src --ignore-src --rosdistro=kinetic -y
然后catkin_make时报错subprocess.CalledProcessError: Command '['/home/jmh/tutorial_ws/devel/env.sh', '/usr/bin/python2', '-c', 'import os; print(dict(os.environ))']' returned non-zero exit status 2
系统版本:Ubuntu 16.04
ros版本:Kinetic