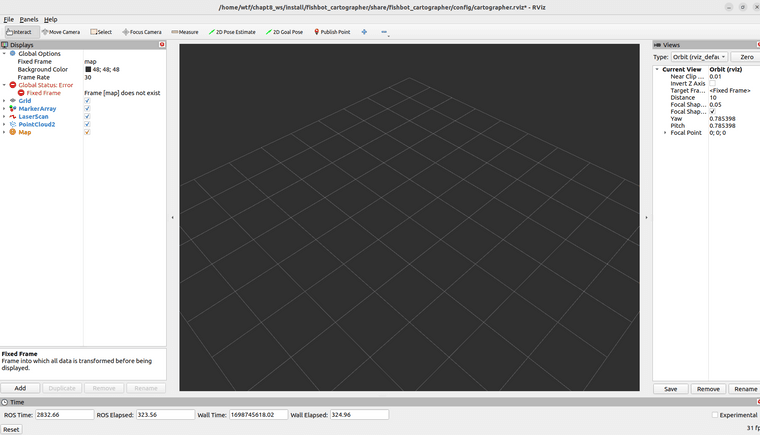
跟着教程先启动gazebo后启动Rviz2,随后Rviz2的Fixed Frame报错

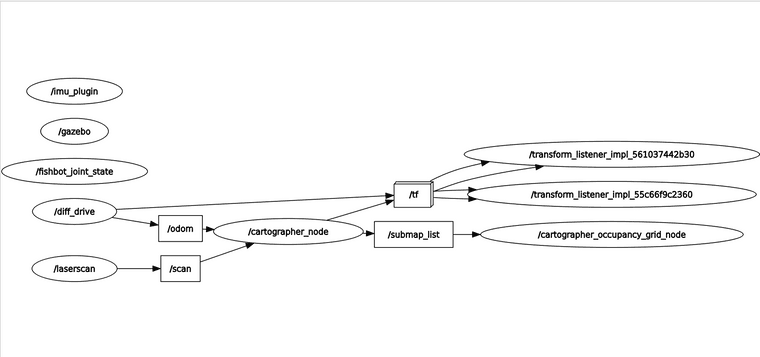
这是我用rqt_graph查看的node和topic,看起来好像也没什么问题
这是gazebo.launch.py的内容:
import os
from launch import LaunchDescription
from launch.actions import ExecuteProcess
from launch_ros.actions import Node
from launch_ros.substitutions import FindPackageShare
def generate_launch_description():
robot_name_in_model = ''
package_name = 'fishbot_description'
urdf_name = "fishbot_base.urdf"
ld = LaunchDescription()
pkg_share = FindPackageShare(package=package_name).find(package_name)
urdf_model_path = os.path.join(pkg_share, f'urdf/{urdf_name}')
gazebo_world_path = os.path.join(pkg_share, 'world/fishbot.world')
# Start Gazebo server
start_gazebo_cmd = ExecuteProcess(
cmd=['gazebo', '--verbose','-s', 'libgazebo_ros_init.so', '-s', 'libgazebo_ros_factory.so',gazebo_world_path],
output='screen')
# Launch the robot
spawn_entity_cmd = Node(
package='gazebo_ros',
executable='spawn_entity.py',
arguments=['-entity', robot_name_in_model, '-file', urdf_model_path ], output='screen')
ld.add_action(start_gazebo_cmd)
ld.add_action(spawn_entity_cmd)
return ld
这是cartographer.launch.py的内容:
import os
from launch import LaunchDescription
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import Node
from launch_ros.substitutions import FindPackageShare
def generate_launch_description():
# 定位到功能包的地址
pkg_share = FindPackageShare(package='fishbot_cartographer').find('fishbot_cartographer')
#=====================运行节点需要的配置=======================================================================
# 是否使用仿真时间,我们用gazebo,这里设置成true
use_sim_time = LaunchConfiguration('use_sim_time', default='true')
# 地图的分辨率
resolution = LaunchConfiguration('resolution', default='0.05')
# 地图的发布周期
publish_period_sec = LaunchConfiguration('publish_period_sec', default='1.0')
# 配置文件夹路径
configuration_directory = LaunchConfiguration('configuration_directory',default= os.path.join(pkg_share, 'config') )
# 配置文件
configuration_basename = LaunchConfiguration('configuration_basename', default='fishbot_2d.lua')
rviz_config_dir = os.path.join(pkg_share, 'config')+"/cartographer.rviz"
print(f"rviz config in {rviz_config_dir}")
#=====================声明三个节点,cartographer/occupancy_grid_node/rviz_node=================================
cartographer_node = Node(
package='cartographer_ros',
executable='cartographer_node',
name='cartographer_node',
output='screen',
parameters=[{'use_sim_time': use_sim_time}],
arguments=['-configuration_directory', configuration_directory,
'-configuration_basename', configuration_basename])
cartographer_occupancy_grid_node = Node(
package='cartographer_ros',
executable='cartographer_occupancy_grid_node',
name='cartographer_occupancy_grid_node',
output='screen',
parameters=[{'use_sim_time': use_sim_time}],
arguments=['-resolution', resolution, '-publish_period_sec', publish_period_sec])
rviz_node = Node(
package='rviz2',
executable='rviz2',
name='rviz2',
arguments=['-d', rviz_config_dir],
parameters=[{'use_sim_time': use_sim_time}],
output='screen')
#===============================================定义启动文件========================================================
ld = LaunchDescription()
ld.add_action(cartographer_node)
ld.add_action(cartographer_occupancy_grid_node)
ld.add_action(rviz_node)
return ld
gazebo和Rviz2都启动正常,网上搜索尝试了一些办法也没解决,请各位帮我看看问题出哪了