@望天 这个不借,可以试试
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
宏沉一笑 发布的最新帖子
-
RE: fishros工具安装humble后编译d2lros2-humble-code/fishbot_ws报错发布在 ROS2
@小鱼
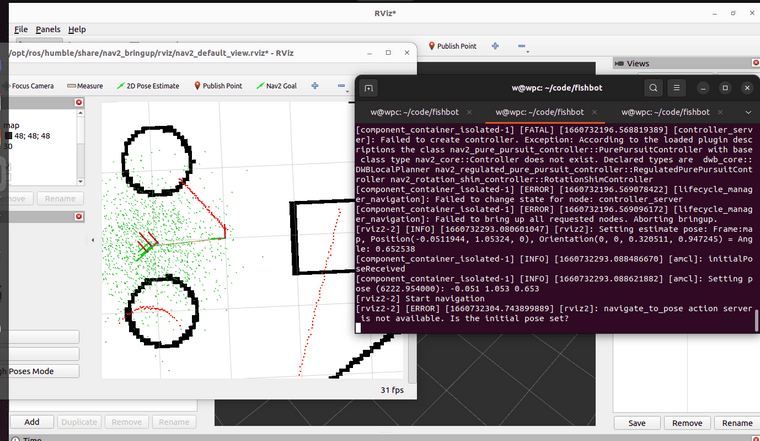
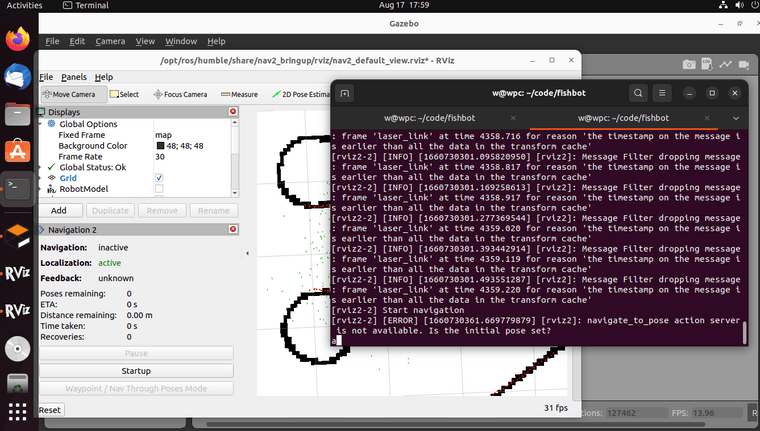
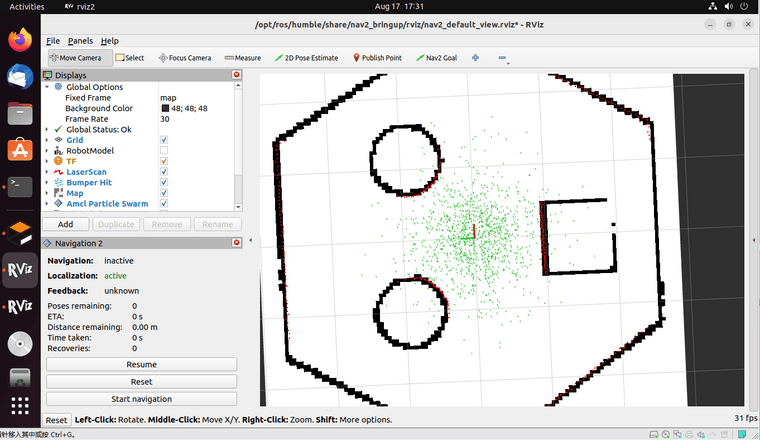
运行了这个命令 ros2 launch fishbot_navigation2 navigation2.launch.py 后,没有成功 它出现了下面的错误
[rviz2-2] [ERROR] [1660639092.717540128] [rviz2]: navigate_to_pose action server is not available. Is the initial pose set?这个要怎么解决了?
-
RE: fishros工具安装humble后编译d2lros2-humble-code/fishbot_ws报错发布在 ROS2
@小鱼 《nav2_pure_pursuit_controller》 这个功能包错误 怎么解决呀?
-
RE: 一键安装ROS2humble时,提示软件包有未满足的依赖关系发布在 一键安装
0 packages upgraded, 903 newly installed, 0 to remove and 0 not upgraded. Need to get 664 MB of archives. After unpacking 2,541 MB will be used. The following packages have unmet dependencies: ros-humble-desktop : Depends: ros-humble-rviz-default-plugins but it is not installable Depends: ros-humble-rviz2 but it is not installable The following actions will resolve these dependencies: Keep the following packages at their current version: 1) ros-humble-desktop [Not Installed] Accept this solution? [Y/n/q/?] n *** No more solutions available *** The following actions will resolve these dependencies: Keep the following packages at their current version: 1) ros-humble-desktop [Not Installed] Accept this solution? [Y/n/q/?]