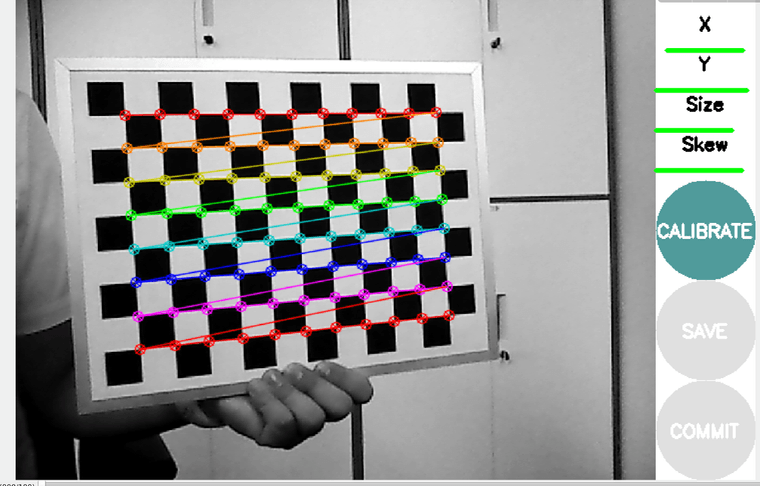
这边单独运行相机节点发布了rgb和depth数据,然后修改rtabmap.launch.py内部参数如下
# Arguments
DeclareLaunchArgument('stereo', default_value='false', description='Use stereo input instead of RGB-D.'),
DeclareLaunchArgument('localization', default_value='false', description='Launch in localization mode.'),
DeclareLaunchArgument('rtabmapviz', default_value='true', description='Launch RTAB-Map UI (optional).'),
DeclareLaunchArgument('rviz', default_value='false', description='Launch RVIZ (optional).'),
DeclareLaunchArgument('use_sim_time', default_value='false', description='Use simulation (Gazebo) clock if true'),
# Config files
DeclareLaunchArgument('cfg', default_value='', description='To change RTAB-Map\'s parameters, set the path of config file (*.ini) generated by the standalone app.'),
DeclareLaunchArgument('gui_cfg', default_value='~/.ros/rtabmap_gui.ini', description='Configuration path of rtabmapviz.'),
DeclareLaunchArgument('rviz_cfg', default_value=config_rviz, description='Configuration path of rviz2.'),
DeclareLaunchArgument('frame_id', default_value='camera_link', description='Fixed frame id of the robot (base frame), you may set "base_link" or "base_footprint" if they are published. For camera-only config, this could be "camera_link".'),
DeclareLaunchArgument('odom_frame_id', default_value='', description='If set, TF is used to get odometry instead of the topic.'),
DeclareLaunchArgument('map_frame_id', default_value='map', description='Output map frame id (TF).'),
DeclareLaunchArgument('publish_tf_map', default_value='true', description='Publish TF between map and odomerty.'),
DeclareLaunchArgument('namespace', default_value='rtabmap', description=''),
DeclareLaunchArgument('database_path', default_value='~/.ros/rtabmap.db', description='Where is the map saved/loaded.'),
DeclareLaunchArgument('queue_size', default_value='20', description=''),
DeclareLaunchArgument('qos', default_value='2', description='General QoS used for sensor input data: 0=system default, 1=Reliable, 2=Best Effort.'),
DeclareLaunchArgument('wait_for_transform', default_value='0.2', description=''),
DeclareLaunchArgument('rtabmap_args', default_value='', description='Backward compatibility, use "args" instead.'),
DeclareLaunchArgument('launch_prefix', default_value='', description='For debugging purpose, it fills prefix tag of the nodes, e.g., "xterm -e gdb -ex run --args"'),
DeclareLaunchArgument('output', default_value='screen', description='Control node output (screen or log).'),
DeclareLaunchArgument('ground_truth_frame_id', default_value='', description='e.g., "world"'),
DeclareLaunchArgument('ground_truth_base_frame_id', default_value='', description='e.g., "tracker", a fake frame matching the frame "frame_id" (but on different TF tree)'),
DeclareLaunchArgument('approx_sync', default_value='true', description='If timestamps of the input topics should be synchronized using approximate or exact time policy.'),
# RGB-D related topics
DeclareLaunchArgument('rgb_topic', default_value='/camera/color/image_raw', description=''),
DeclareLaunchArgument('depth_topic', default_value='/camera/depth/image_raw', description=''),
DeclareLaunchArgument('camera_info_topic', default_value='/camera/depth/camera_info',description=''),
# Stereo related topics
DeclareLaunchArgument('stereo_namespace', default_value='/stereo_camera', description=''),
DeclareLaunchArgument('left_image_topic', default_value=[LaunchConfiguration('stereo_namespace'), '/left/image_rect_color'], description=''),
DeclareLaunchArgument('right_image_topic', default_value=[LaunchConfiguration('stereo_namespace'), '/right/image_rect'], description='Use grayscale image for efficiency'),
DeclareLaunchArgument('left_camera_info_topic', default_value=[LaunchConfiguration('stereo_namespace'), '/left/camera_info'], description=''),
DeclareLaunchArgument('right_camera_info_topic', default_value=[LaunchConfiguration('stereo_namespace'), '/right/camera_info'], description=''),
# Use Pre-sync RGBDImage format
DeclareLaunchArgument('rgbd_sync', default_value='false', description='Pre-sync rgb_topic, depth_topic, camera_info_topic.'),
DeclareLaunchArgument('approx_rgbd_sync', default_value='true', description='false=exact synchronization.'),
DeclareLaunchArgument('subscribe_rgbd', default_value=LaunchConfiguration('rgbd_sync'), description='Already synchronized RGB-D related topic, e.g., with rtabmap_ros/rgbd_sync nodelet.'),
DeclareLaunchArgument('rgbd_topic', default_value='rgbd_image', description=''),
DeclareLaunchArgument('depth_scale', default_value='1.0', description=''),
# Image topic compression
DeclareLaunchArgument('compressed', default_value='false', description='If you want to subscribe to compressed image topics'),
DeclareLaunchArgument('rgb_image_transport', default_value='compressed', description='Common types: compressed, theora (see "rosrun image_transport list_transports")'),
DeclareLaunchArgument('depth_image_transport', default_value='compressedDepth', description='Depth compatible types: compressedDepth (see "rosrun image_transport list_transports")'),
# LiDAR
DeclareLaunchArgument('subscribe_scan', default_value='false', description=''),
DeclareLaunchArgument('scan_topic', default_value='/scan', description=''),
DeclareLaunchArgument('subscribe_scan_cloud', default_value='false', description=''),
DeclareLaunchArgument('scan_cloud_topic', default_value='/scan_cloud', description=''),
DeclareLaunchArgument('scan_normal_k', default_value='0', description=''),
# Odometry
DeclareLaunchArgument('visual_odometry', default_value='true', description='Launch rtabmap visual odometry node.'),
DeclareLaunchArgument('icp_odometry', default_value='false', description='Launch rtabmap icp odometry node.'),
DeclareLaunchArgument('odom_topic', default_value='odom', description='Odometry topic name.'),
DeclareLaunchArgument('vo_frame_id', default_value=LaunchConfiguration('odom_topic'), description='Visual/Icp odometry frame ID for TF.'),
DeclareLaunchArgument('publish_tf_odom', default_value='true', description=''),
DeclareLaunchArgument('odom_tf_angular_variance', default_value='0.01', description='If TF is used to get odometry, this is the default angular variance'),
DeclareLaunchArgument('odom_tf_linear_variance', default_value='0.001', description='If TF is used to get odometry, this is the default linear variance'),
DeclareLaunchArgument('odom_args', default_value='', description='More arguments for odometry (overwrite same parameters in rtabmap_args).'),
DeclareLaunchArgument('odom_sensor_sync', default_value='false', description=''),
DeclareLaunchArgument('odom_guess_frame_id', default_value='', description=''),
DeclareLaunchArgument('odom_guess_min_translation', default_value='0.0', description=''),
DeclareLaunchArgument('odom_guess_min_rotation', default_value='0.0', description=''),
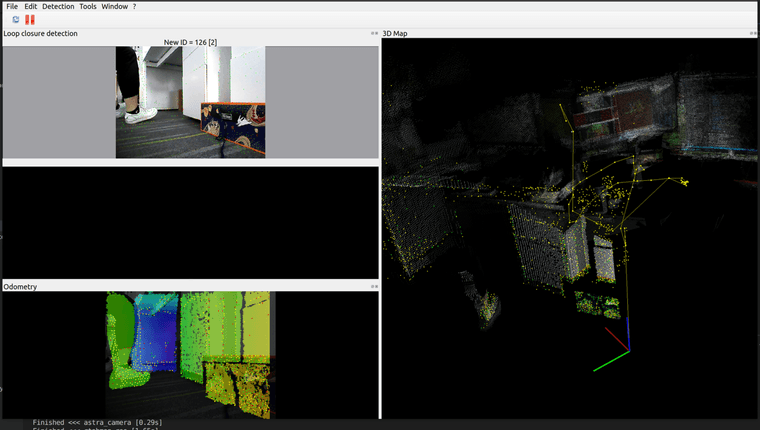
运行的时候rtabmapiz控制台会报错
util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
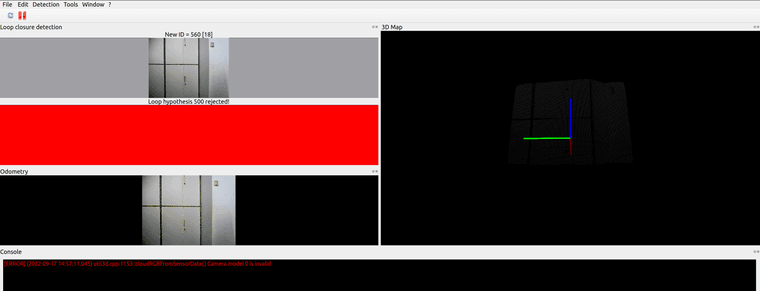
不建图 只显示单帧数据
初学小菜鸟求解
终端里面看起来视觉里程计也不太正常
[rgbd_odometry-1] [INFO] [1663398187.567110256] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.010347s
[rgbd_odometry-1] [INFO] [1663398187.576459463] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008404s
[rgbd_odometry-1] [INFO] [1663398187.659465616] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.012715s
[rgbd_odometry-1] [INFO] [1663398187.668895425] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008550s
[rgbd_odometry-1] [INFO] [1663398187.677696538] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.007952s
[rgbd_odometry-1] [INFO] [1663398187.761097371] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.011698s
[rgbd_odometry-1] [INFO] [1663398187.770419207] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008257s
[rgbd_odometry-1] [INFO] [1663398187.779528887] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008267s
[rgbd_odometry-1] [INFO] [1663398187.859531168] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.012646s
[rgbd_odometry-1] [INFO] [1663398187.868233829] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.007911s
[rgbd_odometry-1] [INFO] [1663398187.877549215] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008469s
[rgbd_odometry-1] [INFO] [1663398187.954169813] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.014044s
[rgbd_odometry-1] [INFO] [1663398187.966101802] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.010370s
[rgbd_odometry-1] [INFO] [1663398187.975220213] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008089s
[rgbd_odometry-1] [INFO] [1663398188.061192398] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.013515s
[rgbd_odometry-1] [INFO] [1663398188.070477343] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008116s
[rgbd_odometry-1] [INFO] [1663398188.154086911] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.013209s
[rgbd_odometry-1] [INFO] [1663398188.163276074] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008290s
[rgbd_odometry-1] [INFO] [1663398188.171984495] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008008s
[rgbd_odometry-1] [INFO] [1663398188.256393842] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.012317s
[rgbd_odometry-1] [INFO] [1663398188.266197199] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008756s
[rgbd_odometry-1] [INFO] [1663398188.275826993] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008637s
[rtabmap-2] [INFO] [1663398188.298330109] [rtabmap.rtabmap]: rtabmap (886): Rate=1.00s, Limit=0.000s, Conversion=0.0011s, RTAB-Map=0.0394s, Maps update=0.0011s pub=0.0000s (local map=1, WM=91)
[rgbd_odometry-1] [INFO] [1663398188.353489587] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.009776s
[rgbd_odometry-1] [INFO] [1663398188.365871727] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.011197s
[rgbd_odometry-1] [INFO] [1663398188.456308309] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.012305s
[rgbd_odometry-1] [INFO] [1663398188.465904362] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008395s
[rgbd_odometry-1] [INFO] [1663398188.561805348] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.010105s
[rgbd_odometry-1] [INFO] [1663398188.570939979] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.007963s
[rgbd_odometry-1] [INFO] [1663398188.580873370] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008837s
[rgbd_odometry-1] [INFO] [1663398188.656436723] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.011586s
[rgbd_odometry-1] [INFO] [1663398188.665989805] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008765s
[rgbd_odometry-1] [INFO] [1663398188.674980852] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008231s
[rgbd_odometry-1] [INFO] [1663398188.760119437] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.012440s
[rgbd_odometry-1] [INFO] [1663398188.769558146] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008428s
[rgbd_odometry-1] [INFO] [1663398188.856946555] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.010834s
[rgbd_odometry-1] [INFO] [1663398188.866650130] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008819s
[rgbd_odometry-1] [INFO] [1663398188.958472057] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.010210s
[rgbd_odometry-1] [INFO] [1663398188.969012183] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.009272s
[rgbd_odometry-1] [INFO] [1663398188.977962460] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008188s
[rgbd_odometry-1] [INFO] [1663398189.060579573] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.012241s
[rgbd_odometry-1] [INFO] [1663398189.070776441] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008862s
[rgbd_odometry-1] [INFO] [1663398189.164213736] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.012140s
[rgbd_odometry-1] [INFO] [1663398189.173621654] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008350s
[rgbd_odometry-1] [INFO] [1663398189.258661907] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.013464s
[rgbd_odometry-1] [INFO] [1663398189.267545912] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.007793s
[rgbd_odometry-1] [INFO] [1663398189.278019196] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.009486s
[rtabmap-2] [INFO] [1663398189.300369068] [rtabmap.rtabmap]: rtabmap (887): Rate=1.00s, Limit=0.000s, Conversion=0.0007s, RTAB-Map=0.0393s, Maps update=0.0014s pub=0.0000s (local map=1, WM=91)
[rgbd_odometry-1] [INFO] [1663398189.360101207] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.007820s
[rgbd_odometry-1] [INFO] [1663398189.416060394] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.013199s
[rgbd_odometry-1] [INFO] [1663398189.459732742] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.013063s
[rgbd_odometry-1] [INFO] [1663398189.564018531] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.012771s
[rgbd_odometry-1] [INFO] [1663398189.574200748] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008654s
[rgbd_odometry-1] [INFO] [1663398189.583941935] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008913s
[rgbd_odometry-1] [INFO] [1663398189.659493997] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.012491s
[rgbd_odometry-1] [INFO] [1663398189.668725600] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008498s
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:04.973) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:05.154) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:05.349) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:05.454) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:05.561) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:05.671) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:05.772) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:05.951) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:06.057) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:06.170) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:06.278) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:06.378) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:06.478) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:06.653) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:06.759) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:06.864) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:06.969) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:07.071) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:07.175) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:07.356) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:07.459) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:07.577) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:07.762) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:07.879) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:08.062) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:08.258) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:08.457) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:08.563) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:08.676) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:08.857) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:08.959) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:09.062) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:09.165) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:09.271) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:09.417) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rtabmapviz-3] [ERROR] (2022-09-17 15:03:09.565) util3d.cpp:1153::cloudRGBFromSensorData() Camera model 0 is invalid
[rgbd_odometry-1] [INFO] [1663398189.678191080] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008484s
[rgbd_odometry-1] [INFO] [1663398189.758836876] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.012958s
[rgbd_odometry-1] [INFO] [1663398189.768478489] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008805s
[rgbd_odometry-1] [INFO] [1663398189.777609651] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008430s
[rgbd_odometry-1] [INFO] [1663398189.862392836] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.013230s
[rgbd_odometry-1] [INFO] [1663398189.872169654] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008953s
[rgbd_odometry-1] [INFO] [1663398189.881003328] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.007995s
[rgbd_odometry-1] [INFO] [1663398189.959873730] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.011876s
[rgbd_odometry-1] [INFO] [1663398189.969237688] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008533s
[rgbd_odometry-1] [INFO] [1663398189.978436890] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008343s
[rgbd_odometry-1] [INFO] [1663398190.064016056] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.013015s
[rgbd_odometry-1] [INFO] [1663398190.073340082] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008528s
[rgbd_odometry-1] [INFO] [1663398190.082695849] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008457s
[rgbd_odometry-1] [INFO] [1663398190.166727006] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.012962s
[rgbd_odometry-1] [INFO] [1663398190.177161550] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.009585s
[rgbd_odometry-1] [INFO] [1663398190.186435954] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.008062s
[rgbd_odometry-1] [INFO] [1663398190.266314901] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.013465s
[rgbd_odometry-1] [INFO] [1663398190.276995540] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.009441s
[rgbd_odometry-1] [INFO] [1663398190.287504845] [rtabmap.rgbd_odometry]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.009064s
[rtabmap-2] [INFO] [1663398190.308047364] [rtabmap.rtabmap]: rtabmap (888): Rate=1.00s, Limit=0.000s, Conversion=0.0006s, RTAB-Map=0.0400s, Maps update=0.0008s pub=0.0000s (local map=1, WM=91)