安装docker失败,改用angent与小车底板通信
-
@小鱼

我的树莓派版本信息,硬件是树莓派4b。我调整下bps,还有尝试下直接udp协议看看吧 -
此回复已被删除! -
-
-
@17171680-1 有虚拟机吗?在虚拟机上试试,对了,你的树莓派系统是自己装的吗?DDS 什么版本
-
@小鱼 切换了几次串口,然后,主控板挂了:《
我先给电池冲下电,看是不是电池保护的问题。
我的树莓派用的是ubuntu官网给树莓派4b发布的版本,镜像名:ubuntu-mate-22.04-desktop-arm64+raspi.img -
@小鱼 raspi-tf@raspitf-desktop:~/桌面$ rosversion -d
humbleROS2是用的你们的一键安装
-
@小鱼 你们发给我的电池好像不行了,我直接用数据线接电脑或者树莓派,主控是能工作的
-
@小鱼 明天在虚拟机上弄吧。我本意是树莓派集成主控,跑通了后面改jetson的,这样就能做更多的事务,现在看来ROS还是坑有点多
-
@小鱼 试过了bps961200,树莓派一开启microros服务,主控就死机,按rst都不能重启只能拔电那种~~~挺有意思的,哈,我再改回115200看看
-
@17171680-1 115200没问题
-
@17171680-1 主控这边波特率配置也改到961200了吗,另外可以测试下最新版的固件:https://github.com/fishros/fishbot_motion_control_microros/releases
-
@小鱼 就是配置助手改主控为961200,树莓派开服务,我还是用的树莓派USB3.0的口;我现在用的固件是https://fishros.org.cn/forum/assets/uploads/files/1710596193698-fishbot_motion_control_v1.0.0.240316.bin
你准备让我用beta版本的?fishbot_motion_control_v1.0.0.alpha1.240423.bin
我今天搭完虚拟机环境,车可以控制,topic有odom和imu了,也能控制小车了。
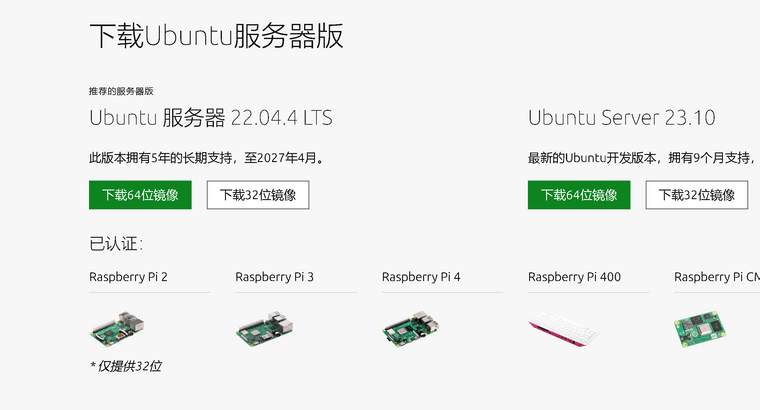
我准备重新做下树莓派的系统,只装ubuntu22桌面版和ROS2,看会不会正常;如果还不行,就装ubuntu22-server和ROS2,还不行那就放弃arm架构;
-
@17171680-1 ubuntu-server 22.04 在树莓派4b上我之前测试过,没啥问题,桌面版估计是网络或者内存配置上有些问题。
-
-
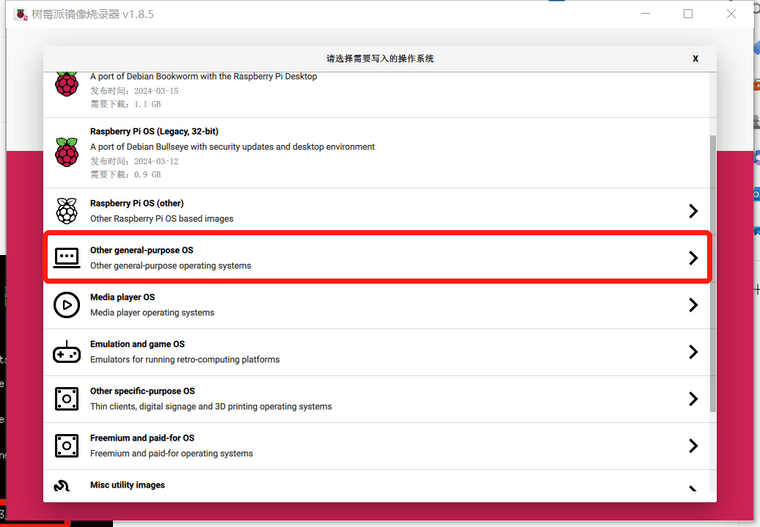
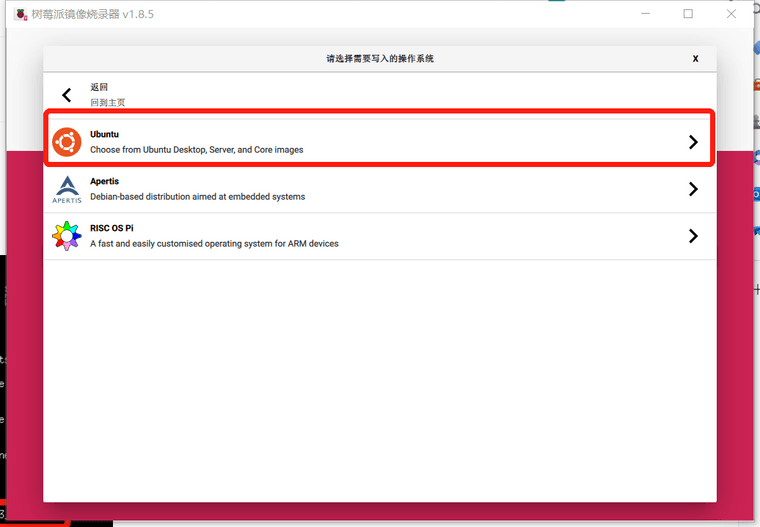
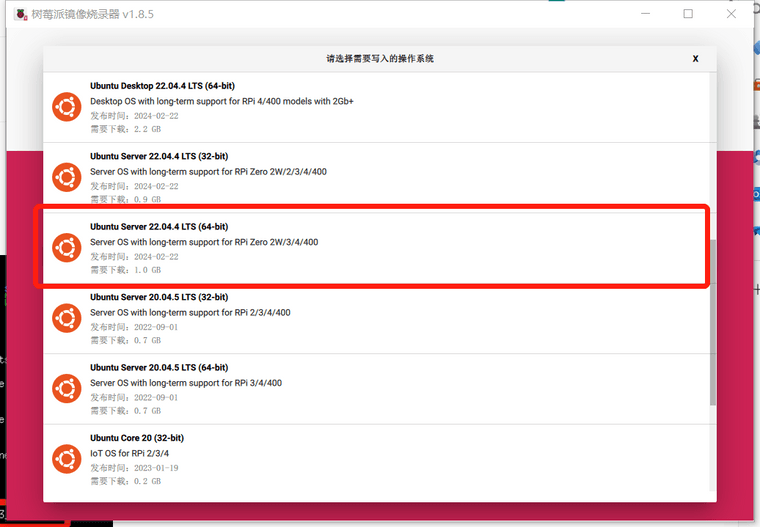
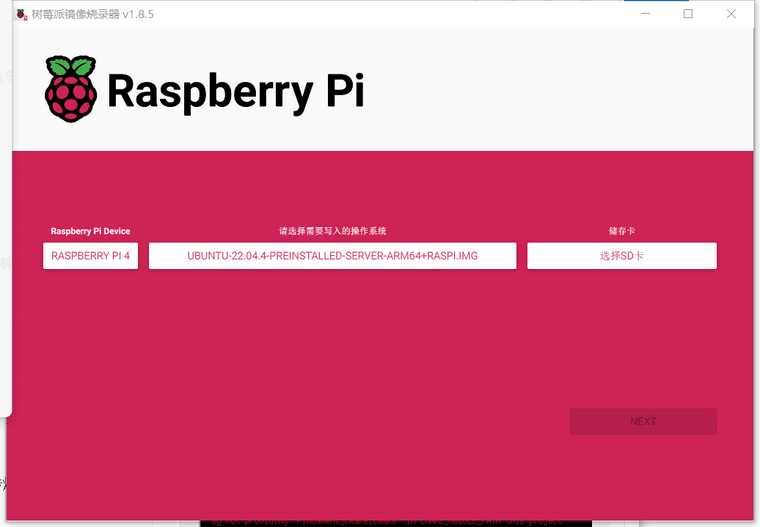
@17171680-1 我用的树莓派烧录工具,选的ubuntu22.04 server,应该是第一个
-
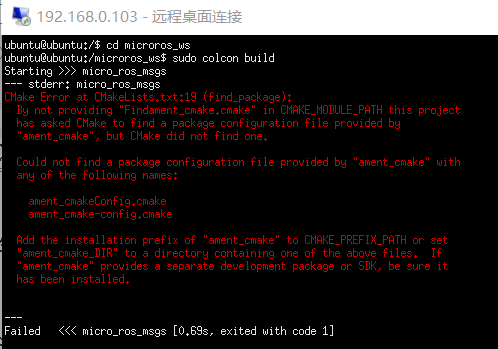
因为是server版本,远程进去没办法复制错误信息
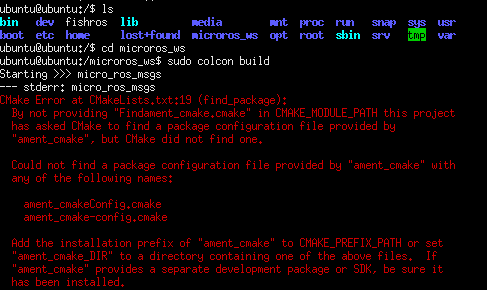
编译的时候缺少"ament_cmake";
我只在系统版本和cmake编译器版本不一致的时候遇到过这种提示我使用的是一键安装,先1(安装ROS2),再3(安装dep),再4(配置环境)
树莓派4b 8g,ubuntu22.04.4,用树莓派专烧工具烧录
我觉得我这块树莓派废了~~~
树莓派5有用过没?
不行我找你们客服买个全套来玩了,只能
-
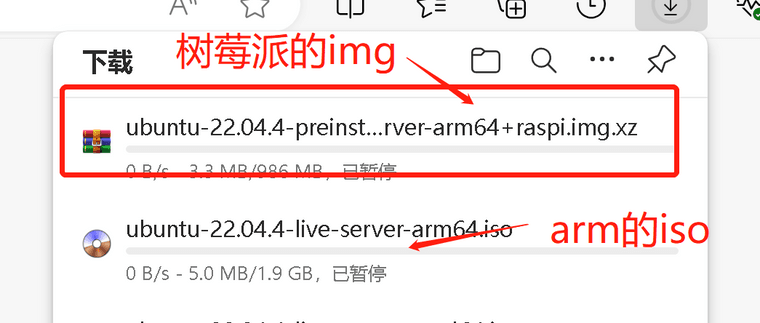
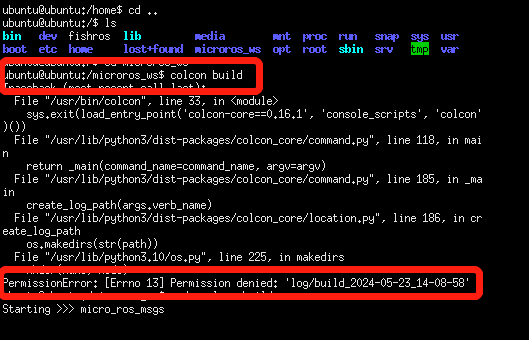
@17171680-1 不要用sudo colcon, sudo 是另外一个bash 环境,另外我之前的操作系统是烧录器提供的,不是自己下载的,不需要自己下载选择的img,直接选系统就好。
-
因为没权限,所以才加了sudo啊
-
我感觉这个和我下的完全一样的版本,从大小来看
我试下吧