ros2 jazzy 显示没有那个文件或目录
-
遇到“没有那个文件或目录”的错误时,通常是因为几个常见的原因。虽然你确认文件路径是正确的,但这里有几个步骤可以帮助你进一步诊断和解决问题:
-
检查当前工作目录:
确保你的当前工作目录(即你运行命令时所在的目录)是正确的。你可以使用pwd(在Linux或Mac OS中)或cd(不带任何参数,仅查看当前目录)来查看当前工作目录。如果当前工作目录不是你期望的目录,你需要使用cd命令切换到正确的目录。 -
使用绝对路径:
尝试使用文件的绝对路径而不是相对路径。绝对路径是从根目录(/)开始的完整路径。这可以避免由于当前工作目录不是你预期的目录而导致的路径错误。 -
检查路径中的空格和特殊字符:
如果路径中包含空格或特殊字符(如&,(,),$,*等),确保在命令行中正确引用整个路径。在bash中,你可以使用单引号(')或双引号(")来引用包含空格或特殊字符的路径。 -
文件或目录权限:
确保你有权限访问该文件或目录。你可以使用ls -l <文件或目录名>来查看文件或目录的权限。如果没有足够的权限,你可能需要使用sudo(如果你在Linux或Mac OS上)来运行你的命令,或者更改文件/目录的权限(使用chmod命令)。 -
检查文件名或目录名是否正确:
有时可能由于大小写错误或拼写错误导致无法找到文件或目录。确保文件名和目录名的大小写完全正确,并且没有额外的空格或不可见字符。 -
使用文件浏览器验证:
在图形界面中使用文件浏览器(如Nautilus, Finder等)来验证文件或目录是否真的存在于你认为的位置。 -
查看隐藏文件或目录:
如果文件或目录以.开头,它将是隐藏的。在命令行中,你可以使用ls -a来查看包括隐藏文件在内的所有文件和目录。 -
检查ROS2环境:
由于你在使用ROS2,确保ROS2的环境变量已经正确设置。你可以使用echo $ROS_PACKAGE_PATH来查看ROS包路径是否被正确设置。
如果以上步骤都不能解决问题,请考虑在ROS2社区、Stack Overflow或其他相关论坛上寻求帮助,并提供尽可能详细的错误信息和上下文。
以上为生成回答,仅供参考~
-
-
@zio 在 ros2 jazzy 显示没有那个文件或目录 中说:
各位大佬下午好,新手问题

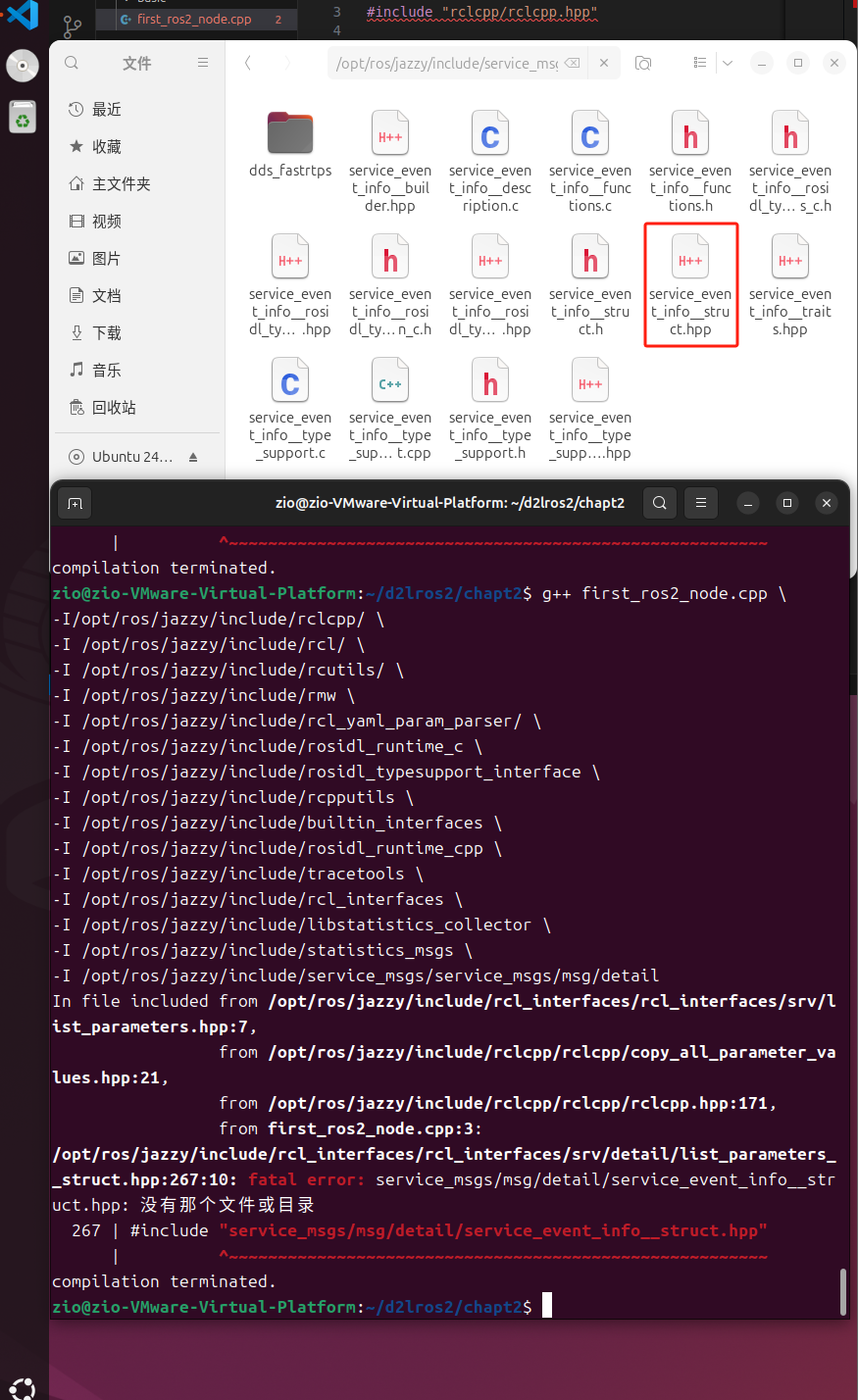 文件确实在这里(图中方框),路径是直接复制的,但是显示没有那个文件或路径
文件确实在这里(图中方框),路径是直接复制的,但是显示没有那个文件或路径之前找别的文件是正常的,就这条指令最后一句一直找不到io@zio-VMware-Virtual-Platform:~/d2lros2/chapt2$ g++ first_ros2_node.cpp \ -I/opt/ros/jazzy/include/rclcpp/
-I /opt/ros/jazzy/include/rcl/
-I /opt/ros/jazzy/include/rcutils/
-I /opt/ros/jazzy/include/rmw
-I /opt/ros/jazzy/include/rcl_yaml_param_parser/
-I /opt/ros/jazzy/include/rosidl_runtime_c
-I /opt/ros/jazzy/include/rosidl_typesupport_interface
-I /opt/ros/jazzy/include/rcpputils
-I /opt/ros/jazzy/include/builtin_interfaces
-I /opt/ros/jazzy/include/rosidl_runtime_cpp
-I /opt/ros/jazzy/include/tracetools
-I /opt/ros/jazzy/include/rcl_interfaces
-I /opt/ros/jazzy/include/libstatistics_collector
-I /opt/ros/jazzy/include/statistics_msgs \
-I /opt/ros/jazzy/include/service_msgs/service_msgs/msg/detail
In file included from /opt/ros/jazzy/include/rcl_interfaces/rcl_interfaces/srv/list_parameters.hpp:7,
from /opt/ros/jazzy/include/rclcpp/rclcpp/copy_all_parameter_values.hpp:21,
from /opt/ros/jazzy/include/rclcpp/rclcpp/rclcpp.hpp:171,
from first_ros2_node.cpp:3:
/opt/ros/jazzy/include/rcl_interfaces/rcl_interfaces/srv/detail/list_parameters__struct.hpp:267:10: fatal error: service_msgs/msg/detail/service_event_info__struct.hpp: 没有那个文件或目录
267 | #include "service_msgs/msg/detail/service_event_info__struct.hpp"
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
compilation terminated.
zio@zio-VMware-Virtual-Platform:~/d2lros2/chapt2$ echo $ROS_PACKAGE_PATH
:/home/siat/ccny/ccny_vision:/home/siat/catkin_ws/src
zio@zio-VMware-Virtual-Platform:~/d2lros2/chapt2$ -
@zio 已解决
-
@zio 求解 我也遇到这个问题了
-
@1499744277 我的问题不一定跟你的相同。路径只到报错那提示的前面一个
-
@zio
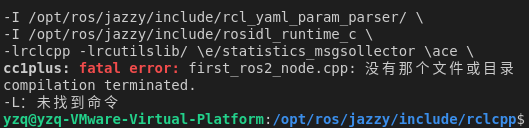
我的报错是这个 还不知道怎么解决
-
@1499744277 未找到命令,应该是你那个-L格式有问题
-
@zio 第一个报错一直解决不掉
 后面那个好说 主要是前面的
后面那个好说 主要是前面的 -
@1499744277 解决了吗 ,你这是运行命令时的位置错了
-
@zio 解决了,虽然报错和小鱼的文章还是不太一样 但是终于是往前走了一步了
-
@zio 你这个是咋解决的,马上就遇到你这个问题了

-
@1499744277 路径到他提示的前面一个就过了
-
-
@zio 解决了,感激不尽,谢谢你!
-
@zio 不好意思,又打扰你了,我现在出现这个报错 而且我文件夹里也找不到这个文件
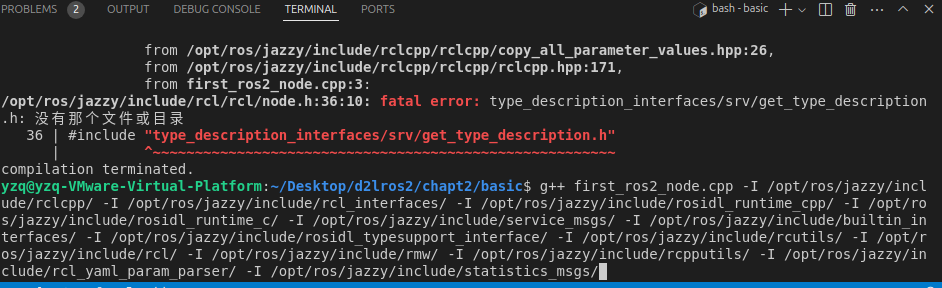 小鱼的命令里面我没找到关于这个的。
小鱼的命令里面我没找到关于这个的。 -
@1499744277 都是一样的解决办法
-
顺着这个思路,我也解决了这个问题,在这里贴一下
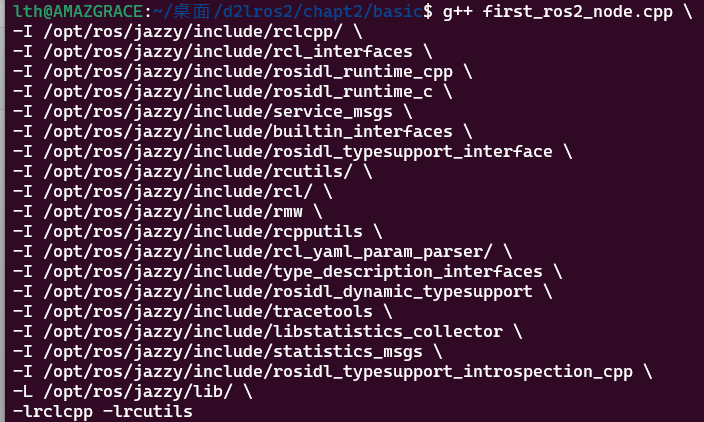
输入命令如下:
g++ first_ros2_node.cpp
-I /opt/ros/jazzy/include/rclcpp/
-I /opt/ros/jazzy/include/rcl_interfaces
-I /opt/ros/jazzy/include/rosidl_runtime_cpp
-I /opt/ros/jazzy/include/rosidl_runtime_c
-I /opt/ros/jazzy/include/service_msgs
-I /opt/ros/jazzy/include/builtin_interfaces
-I /opt/ros/jazzy/include/rosidl_typesupport_interface
-I /opt/ros/jazzy/include/rcutils/
-I /opt/ros/jazzy/include/rcl/
-I /opt/ros/jazzy/include/rmw
-I /opt/ros/jazzy/include/rcpputils
-I /opt/ros/jazzy/include/rcl_yaml_param_parser/
-I /opt/ros/jazzy/include/type_description_interfaces
-I /opt/ros/jazzy/include/rosidl_dynamic_typesupport
-I /opt/ros/jazzy/include/tracetools
-I /opt/ros/jazzy/include/libstatistics_collector
-I /opt/ros/jazzy/include/statistics_msgs
-I /opt/ros/jazzy/include/rosidl_typesupport_introspection_cpp
-L /opt/ros/jazzy/lib/
-lrclcpp -lrcutils