nav2 在运行出错
-
- 代码ros2 humble odom用的ros2_laser_scan_matcher
终端内的报错
[RTPS_TRANSPORT_SHM Error] Failed init_port fastrtps_port7415: open_and_lock_file failed -> Function open_port_internal
[map_server-3] [WARN] [1722087437.450783193] [rcl_lifecycle]: No transition matching 1 found for current state active
[map_server-3] [ERROR] [1722087437.450800925] [map_server]: Unable to start transition 1 from current state active: Transition is not registered., at ./src/rcl_lifecycle.c:355
[rviz2-2] [INFO] [1722087437.480651676] [rviz2]: Stereo is NOT SUPPORTED
[local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Invalid frame ID "odom" passed to canTransform argument target_frame - frame does not exist
[rviz2-2] [WARN] [1722087437.655608471] [rcl.logging_rosout]: Publisher already registered for provided node name. If this is due to multiple nodes with the same name then all logs for that logger name will go out over the existing publisher. As soon as any node with that name is destructed it will unregister the publisher, preventing any further logs for that name from being published on the rosout topic.
*## 列表ropic:
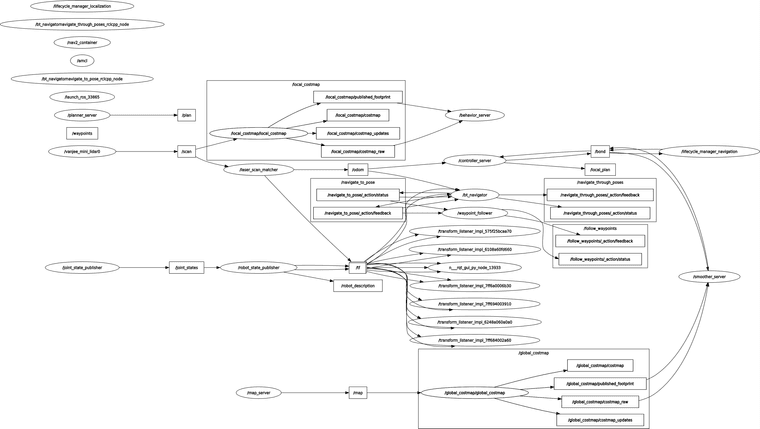 图片地址)
图片地址)-
列表tf:
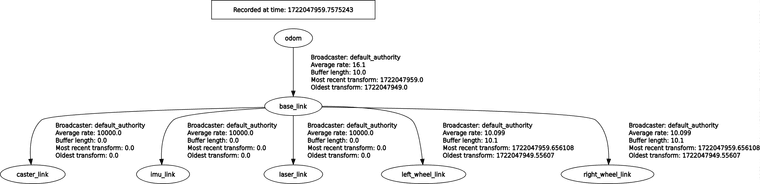
-
#### 列表rviz:
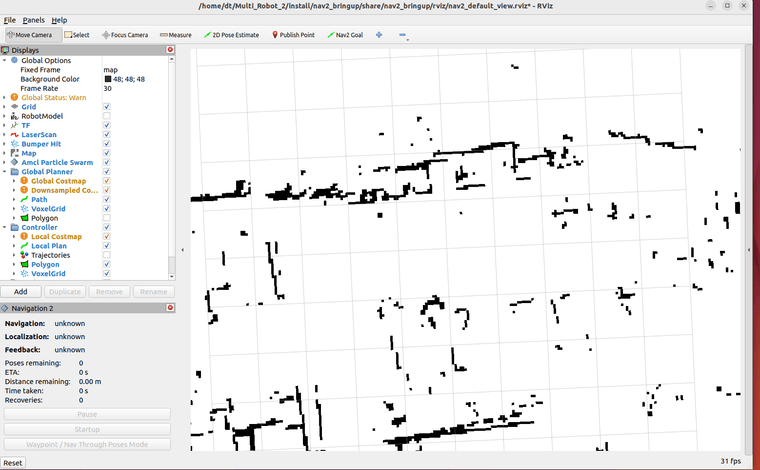
-
您遇到的问题涉及多个方面,包括ROS 2的通信、状态机管理、TF(Transform)树以及RViz的配置。我将逐一分析并给出可能的解决方案:
1. RTPS_TRANSPORT_SHM 错误
这个错误通常与Fast RTPS(ROS 2使用的默认DDS实现)的共享内存配置有关。可能的解决方案包括:
- 检查ROS 2节点的权限:确保运行ROS 2的用户有足够的权限访问系统资源。
- 检查共享内存限制:在某些系统上,共享内存的使用可能受到限制。您可能需要调整系统的
/etc/security/limits.conf文件来增加shmmax和shmall的值。 - 重新启动ROS 2环境:有时简单的重启可以解决网络或共享内存初始化的问题。
2. map_server 生命周期状态机错误
这个错误表明
map_server节点试图从一个不支持的状态(active)进行转换,但没有找到对应的转换。可能的原因和解决方案包括:- 检查
map_server的生命周期配置:确保map_server节点的生命周期状态机配置正确,并且支持所需的转换。 - 更新或重新配置
map_server:如果使用的是自定义的map_server,请检查其生命周期状态的实现。
3. TF错误:
Timed out waiting for transform from base_link to odom这个错误表明
base_link到odom的TF变换不存在或未及时更新。可能的原因和解决方案包括:- 检查TF提供者:确保有一个节点(如里程计节点)正在发布从
base_link到odom的TF变换。 - 检查TF监听器:确保所有依赖TF的节点(如
local_costmap)都已正确配置以监听必要的TF变换。 - 检查ROS 2时间同步:确保ROS 2系统的时间同步正确设置,因为TF依赖于时间戳来同步不同坐标系之间的数据。
4. RViz警告
- Stereo not supported:这个警告只是告诉您RViz不支持立体视觉显示,如果您的应用不需要立体视觉,则可以忽略此警告。
- Publisher already registered:这通常发生在多个具有相同名称的节点尝试注册到同一个ROS 2话题时。确保每个节点的名称都是唯一的,或者如果这是预期的(例如在重新启动节点时),可以忽略此警告。
5. 检查和调试
- 使用
ros2 topic list和ros2 node list:查看当前运行的话题和节点,确保所有必要的组件都在运行。 - 使用
ros2 bag record和ros2 bag play:如果可能,记录一个包含问题行为的ROS 2包,并在需要时重放它以进行进一步分析。 - 检查RViz配置:确保RViz中的固定框架(Fixed Frame)设置为正确的框架(如
map或odom),并且所有必要的显示项都已正确配置。
希望这些建议能帮助您解决问题!如果问题仍然存在,请考虑提供更详细的配置和代码信息以便进一步分析。
以上为生成回答,仅供参考~
-
-
@小鱼 ```感谢回答
这是我的amcl里面参数的代码,然后启动launch文件是在学ros2里面的一样,文件路径换成自己的,也是启动了bring_up里面的launch文件。这个amcl参数是写错了吗?如果正确的话还有哪些因素会影响到map到odom这段tf,使nav2不能正确工作。
amcl:
ros__parameters:
use_sim_time: False
alpha1: 0.2
alpha2: 0.2
alpha3: 0.2
alpha4: 0.2
alpha5: 0.2
base_frame_id: "base_footprint"
beam_skip_distance: 0.5
beam_skip_error_threshold: 0.9
beam_skip_threshold: 0.3
do_beamskip: false
global_frame_id: "map"
lambda_short: 0.1
laser_likelihood_max_dist: 2.0
laser_max_range: 100.0
laser_min_range: -1.0
laser_model_type: "likelihood_field"
max_beams: 60
max_particles: 2000
min_particles: 500
odom_frame_id: "odom"
pf_err: 0.05
pf_z: 0.99
recovery_alpha_fast: 0.0
recovery_alpha_slow: 0.0
resample_interval: 1
robot_model_type: "differential"
save_pose_rate: 0.5
sigma_hit: 0.2
tf_broadcast: true
transform_tolerance: 1.0
update_min_a: 0.2
update_min_d: 0.25
z_hit: 0.5
z_max: 0.05
z_rand: 0.5
z_short: 0.05amcl_map_client:
ros__parameters:
use_sim_time: Falseamcl_rclcpp_node:
ros__parameters:
use_sim_time: False -
会注意,第一次用这个