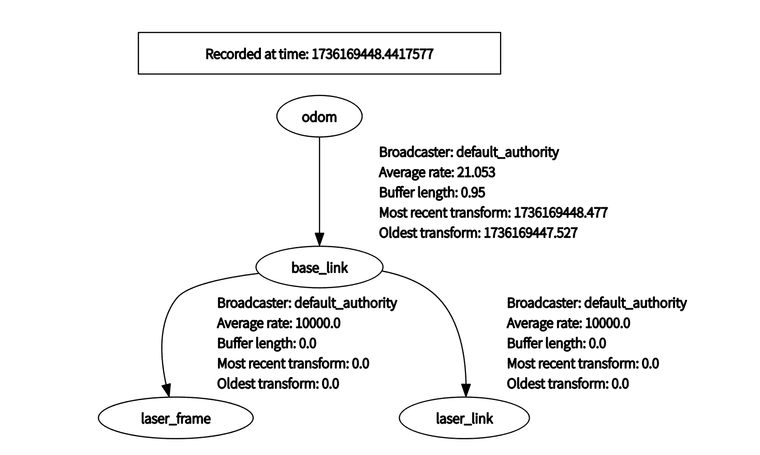
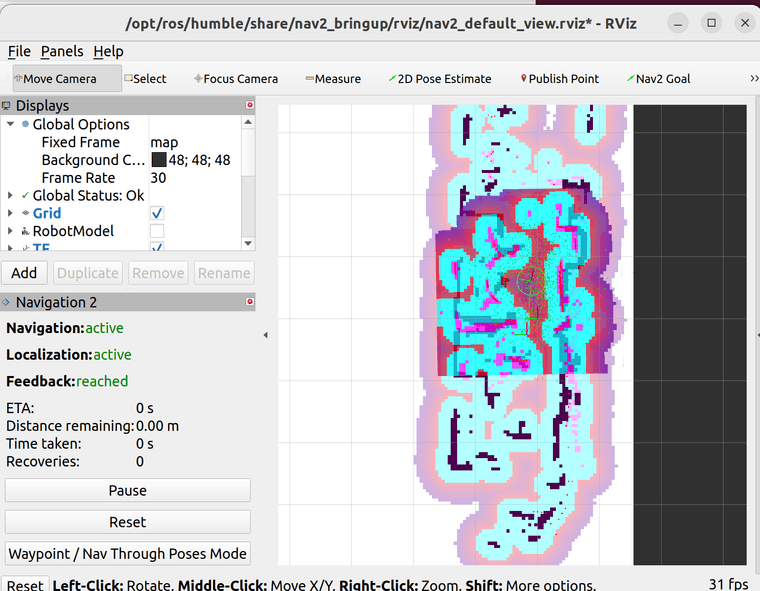
fishbot 机器人导航出错,无法初始化位置
-
-
@liusiyu_alex_nuaa 这个urdf模型在哪里
-
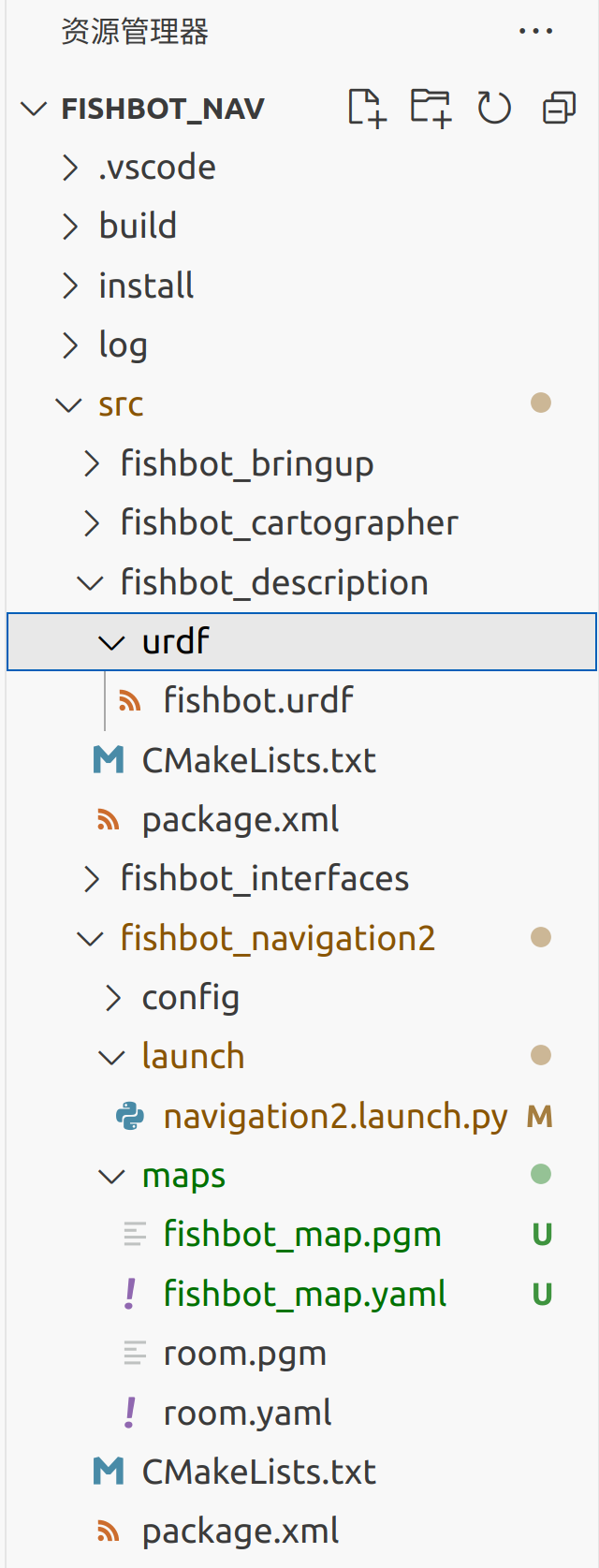
@小鱼 是你的例程
~/fishbot_nav/src/fishbot_description/urdf
-
-
<?xml version="1.0"?> <robot name="fishbot"> <link name="base_footprint" /> <!-- base link --> <link name="base_link"> <visual> <origin xyz="0 0 0.0" rpy="0 0 0" /> <geometry> <cylinder length="0.12" radius="0.10" /> </geometry> <material name="blue"> <color rgba="0.1 0.1 1.0 0.5" /> </material> </visual> </link> <joint name="base_joint" type="fixed"> <parent link="base_footprint" /> <child link="base_link" /> <origin xyz="0.0 0.0 0.076" rpy="0 0 0" /> </joint> <!-- laser link --> <link name="laser_link"> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <cylinder length="0.02" radius="0.02" /> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5" /> </material> </visual> </link> <joint name="laser_joint" type="fixed"> <parent link="base_link" /> <child link="laser_link" /> <origin xyz="0 0 0.075" rpy="0 0 0" /> </joint> <!-- laser link --> <link name="laser_frame"> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <cylinder length="0.02" radius="0.02" /> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5" /> </material> </visual> </link> <joint name="laser_frame_joint" type="fixed"> <parent link="base_link" /> <child link="laser_frame" /> <origin xyz="0 0 0.075" rpy="0 0 0" /> </joint> </robot> -
@liusiyu_alex_nuaa 使用的是哪个分支的文件
-
@小鱼 用这个代码从github上下载的
git clone https://github.com/fishros/fishbot_nav.git --depth=1 -
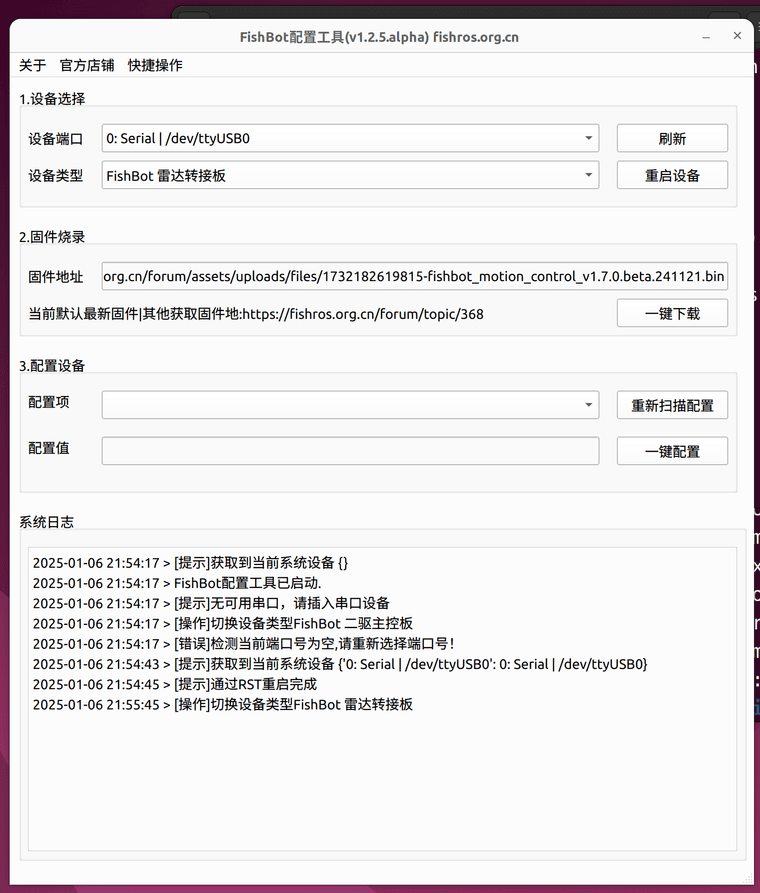
@liusiyu_alex_nuaa 小车的固件版本是?
-
@小鱼
电机驱动版本https://fishros.org.cn/forum/assets/uploads/files/1732182619815-fishbot_motion_control_v1.7.0.beta.241121.bin雷达驱动版本
https://fishros.org.cn/forum/assets/uploads/files/1732182619815-fishbot_motion_control_v1.7.0.beta.241121.bin都是配置工具默认的
-
@liusiyu_alex_nuaa 在 fishbot 机器人导航出错,无法初始化位置 中说:
ot_motion_contro
雷达的驱动写错了https://fishros.org.cn/forum/assets/uploads/files/1735192057607-fishbot_laser_control_v1.3.0.alpha.241226.bin -
@liusiyu_alex_nuaa 看主控板的
-
https://fishros.org.cn/forum/assets/uploads/files/1732182619815-fishbot_motion_control_v1.7.0.beta.241121.bin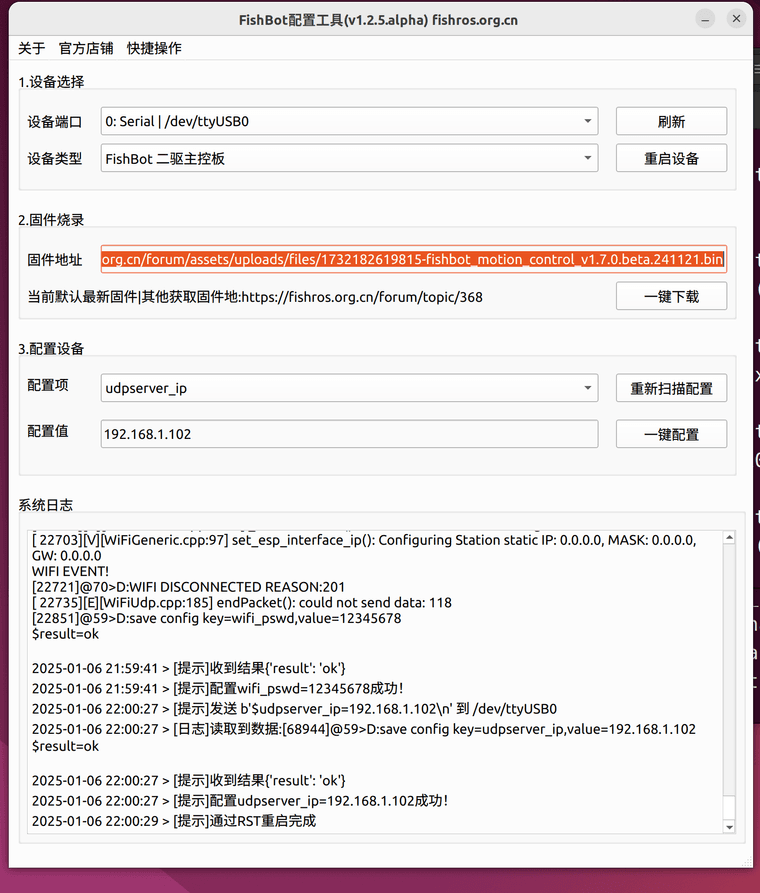
-
@liusiyu_alex_nuaa 稍等一下,我给你一个新版本的固件
-
-
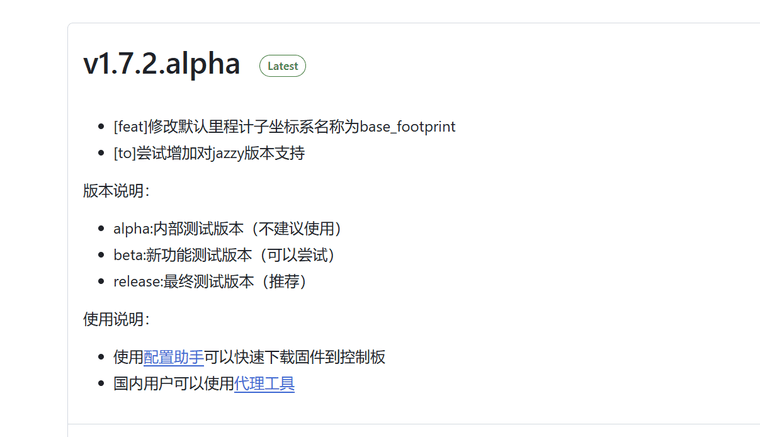
@小鱼 用这个固件试试,固件地址填写这个
-
@小鱼
终于可以了,谢谢小鱼
-
@liusiyu_alex_nuaa 是我的锅,忘记同步最新的固件到社区了
-
@小鱼
不过我这个文件用助手下载不下来,去 https://fishros.org.cn/forum/topic/368 手动下载的最新版,我看文件名称是一样的,然后把本地路径填进去,烧录的 -
@liusiyu_alex_nuaa 收到,我检查下
-
此回复已被删除!