-
https://fishros.com/d2lros2foxy/#/chapt10/10.9使用Fishbot进行自主导航
我的跟着教程做下来,首先是给定机器人一个目标点,而后终端显示
Activating behavior_server
Activating bt_navigator
Activating waypoint_follower
均无问题,但是到了
Activating velocity_smoother
终端提示错误
[component_container_isolated-1] Magick: abort due to signal 11 (SIGSEGV) "Segmentation Fault"...
[ERROR] [component_container_isolated-1]: process has died [pid 24974, exit code -6, cmd '/opt/ros/humble/lib/rclcpp_components/component_container_isolated --ros-args --log-level info --ros-args -r __node:=nav2_container --params-file /tmp/tmpw4ylco3u --params-file /tmp/launch_params_de14nbc0 -r /tf:=tf -r /tf_static:=tf_static'].
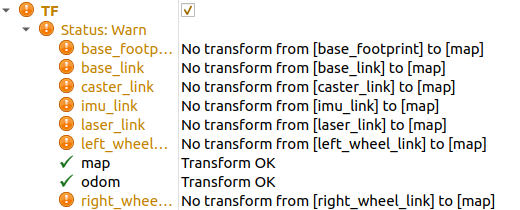
在rviz中,发现TF变黄了 -
-
@北辰
 /home/art/图片/截图
/home/art/图片/截图 -
-
@小鱼 运行代码以后成功work了,我把description包中的rivznode 给注释掉了。另外,在程序运行的过程中,rviz界面中的tf选项在正常与warning之间来回闪动。
-
@北辰 这个应该是tf的更新时间有关系,需要改参数,但目前应该不影响运行
-
@小鱼 transform_tolerance:0.5 是该这个吗
-
 小 小鱼 从 中的 Nav2中文网 移动了该主题
小 小鱼 从 中的 Nav2中文网 移动了该主题
