-
CMake Error at /opt/ros/noetic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by "manipulation_msgs"
with any of the following names:manipulation_msgsConfig.cmake manipulation_msgs-config.cmakeAdd the installation prefix of "manipulation_msgs" to CMAKE_PREFIX_PATH or
set "manipulation_msgs_DIR" to a directory containing one of the above
files. If "manipulation_msgs" provides a separate development package or
SDK, be sure it has been installed.
Call Stack (most recent call first):
marm_planning/CMakeLists.txt:10 (find_package)-- Configuring incomplete, errors occurred!
See also "/home/ros/catkin_ws/build/CMakeFiles/CMakeOutput.log".
See also "/home/ros/catkin_ws/build/CMakeFiles/CMakeError.log".
Invoking "cmake" failed哪位大神能解决这个问题?万分感谢!!!!!
-
@821234877 注意格式哈!
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
- 不要截图,要复制粘贴,一定要代码块包裹
不要截图的原因是,代码方便回答者去复制帮你搜索,而且无论是在手机上还是电脑上都更容易看。
用代码块包裹是为了更加美观,不会一个代码很长一段,不易阅读
问题解决方案也很简单
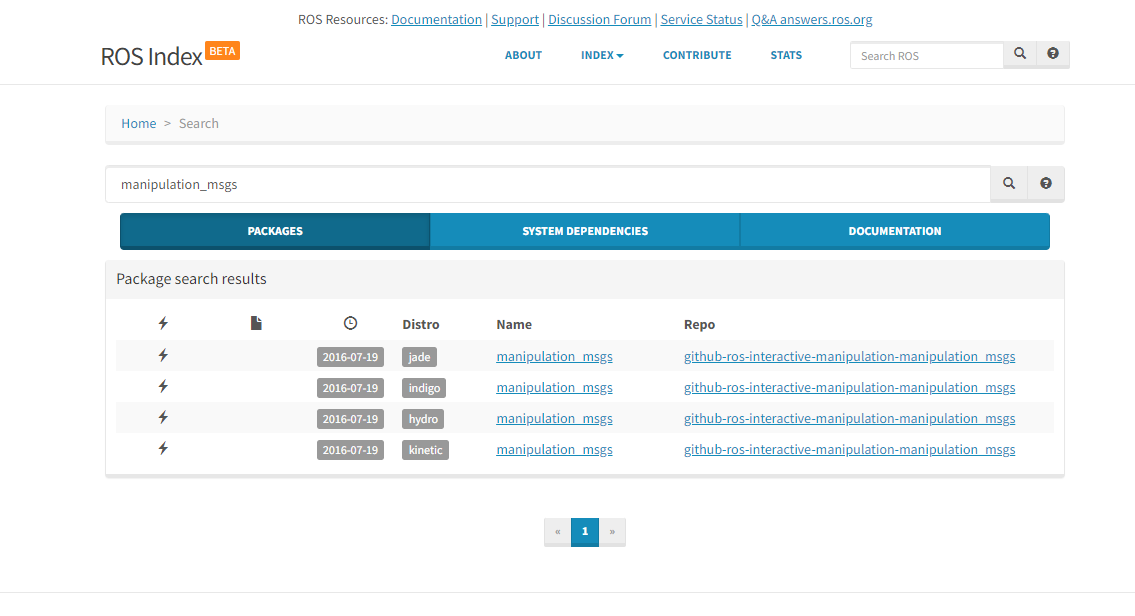
- 先去检索一下这个包是否发布了二进制版的,检索网站
- 如果发布了
sudo apt install ros-版本代号-manipulation-msgs- 如果未发布,源码安装
@小鱼 在 常见问题之安装ROS功能包时提示找不到 中说:
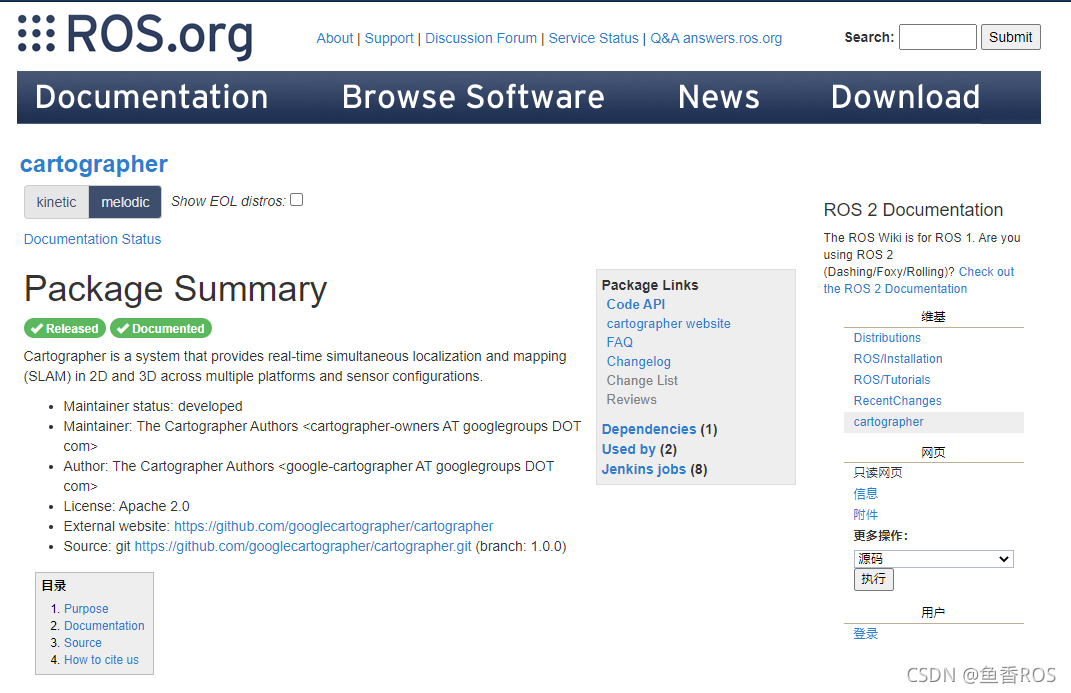
有鱼粉问经常因为某一些功能包安装时找不到,来问小鱼原因,比如在ubuntu20上安装cartographer这个包。
如果你使用下面这条指令肯定会报错
sudo apt install ros-neotic-cartographer原因时什么呢?
很简单,作者没有打包发布这个包的二进制安装文件,通过ROS的官网就可以查知。
那该怎么办呢?
功能包的获取一般有两种方式。
1. 安装获取
安装一般使用
sudo apt install ros-<version>-package_name2. 手动编译获取
手动编译相对麻烦一些,需要下载源码然后进行编译生成相关文件。
什么时候需要手动编译呢?一般我们能安装的功能包都是作者编译好程序将可执行文件上传到仓库中,然后我们才能够通过apt进行安装,如果作者还没来得及测试上传,或者忘记了测试上传,就会找不到对应的包,这时候就需要手动编译安装了。
另外一种就是我们需要对包的源码进行修改,这个时候也需要自己编译修改。
手动编译之后,需要手动source工作空间目录。
所以我们可以根据wiki上所给出的git地址,使用git clone ,下载源码,编译安装(记得切换分支哦)
- 不要截图,要复制粘贴,一定要代码块包裹
-
 小 小鱼 从 中的 社区&开源 移动了该主题
小 小鱼 从 中的 社区&开源 移动了该主题
-
小鱼老师 这个安装包没有noetic版本的啊
-
@821234877 看样子这个包发布到kinetic就没了,你需要手动下载编译哈。
- 找到它的gitub地址
- clone 到你工程的src文件夹下
- 切换分支(看看有没有melodic分支)
-
-
@821234877 举个例子哈,你给的信息里也看不出来你的那个版本的