FishBot里程计和IMU传感器数据融合
-
FishBot里程计和IMU传感器数据融合
需求描述
大家好,我是小鱼。今天我将向大家介绍如何在ROS 2的humble版本上,为fishbot实现里程计和IMU数据的融合,以生成更稳定的里程计数据。
实现步骤
为了实现里程计和IMU数据的融合,我们可以使用一个名为robot_localization的开源库,它提供了ROS 2的humble版本的功能包,非常适用于我们的fishbot机器人平台。你可以在这里找到它的代码库:https://github.com/cra-ros-pkg/robot_localization。
1. 安装robot_localization
首先,我们需要在ROS 2的humble版本上安装robot_localization库。我们可以使用apt命令进行安装,确保安装了适用于ROS 2 humble版本的robot_localization包。让我们一起运行以下命令:
sudo apt install ros-humble-robot-localization -y2. 发布静态TF变换
在开始之前,我们需要发布一个静态TF变换,将base_link和IMU之间的坐标系关系告知robot_localization节点。我们可以使用以下命令行发布该静态TF变换:
ros2 run tf2_ros static_transform_publisher 0.08 0.0 0.03 0 0 0 1 base_link imu其中,0.08、0.0和0.03分别表示x、y和z轴上的平移量。请根据实际情况进行调整。
3. 创建和编写参数文件
在进行数据融合之前,我们需要创建一个参数文件,用于配置robot_localization节点的参数。为了满足fishbot的需求,我会给出一个示例参数文件供参考。你可以使用任何文本编辑器创建一个.yaml文件,并根据自己的需求进行配置。让我们来看一下示例参数文件的内容:
### ekf config file ### ekf_filter_node: ros__parameters: debug: true frequency: 30.0 two_d_mode: false publish_acceleration: false publish_tf: true map_frame: map # 如果未指定,默认为"map" odom_frame: odom # 如果未指定,默认为"odom" base_link_frame: base_link # 如果未指定,默认为"base_link" world_frame: odom # 如果未指定,默认为odom_frame的值 odom0: /odom odom0_config: [true, true, true, false, false, false, false, false, false, false, false, true, false, false, false] imu0: /imu imu0_config: [false, false, false, true, true, true, false, false, false, false, false, false, false, false, false]在这
个示例参数文件中,你可以根据自己的需求进行配置。例如,我们可以将
debug参数设置为true以启用调试模式,将frequency参数设置为30.0以设置节点的频率。另外,我们需要指定里程计和IMU数据的话题,并相应地配置参数。4. 运行融合节点
现在,我们可以通过命令行来启动robot_localization节点并加载参数文件。请打开终端,并运行以下命令:
ros2 run robot_localization ekf_node --ros-args --params-file /path/to/your/params/file.yaml请将
/path/to/your/params/file.yaml替换为你自己的参数文件的实际路径。运行上述命令后,robot_localization节点将会启动,并根据参数文件中的配置来执行里程计和IMU数据的融合。
5. 使用launch文件配置和运行(可选)
除了通过命令行启动节点,我们也可以使用launch文件来更方便地配置和运行robot_localization节点。我已经为你准备了一个示例的launch文件。你可以将以下内容保存为launch文件(例如
robot_localization.launch.py):import os import launch import launch_ros def generate_launch_description(): package_name = 'robot_localization' ld = launch.LaunchDescription() pkg_share = launch_ros.substitutions.FindPackageShare(package=package_name).find(package_name) robot_localization_node = launch_ros.actions.Node( package='robot_localization', executable='ekf_node', name='ekf_filter_node', output='screen', parameters=[os.path.join(pkg_share, 'params/ekf_example.yaml'), {'use_sim_time': launch.substitutions.LaunchConfiguration('use_sim_time')}] ) ld.add_action(launch.actions.DeclareLaunchArgument(name='use_sim_time', default_value='False', description='Flag to enable use_sim_time')) ld.add_action(robot_localization_node) return ld在这个示例的launch文件中,我们使用了
launch_ros.actions.Node来创建一个节点,并设置了参数文件的路径。请根据实际情况修改参数文件的路径。要运行launch文件,请在终端中运行以下命令:
ros2 launch your_package_name robot_localization.launch.py请将
your_package_name替换为你自己的包的名称。通过使用launch文件,我们可以更加方便地配置和运行robot_localization节点。
总结
在本文中,我向大家介绍了如何在ROS 2的humble版本上使用robot_localization库,为fishbot机器人平台实现里程计和IMU数据的融合。通过这种融合方式,我们可以生成更稳定准确的里程计数据,从而提高机器人的导航性能。同时,我还展示了如何发布base_link到IMU的静态TF变换,以供robot_localization节点使用。最后,我介绍了使用launch文件来更方便地配置
测试视频展示:
-
@小鱼 我融合odom和IMU时,机器人在rviz中晃动,这是为什么?已经用complementary_filter_node过滤IMU数据了,并且rostopic type /robot/odometry/filtered_odom :nav_msgs/Odometry,实在不知道哪里导致机器人晃动
-
@2543298600 仔细检查数据源问题,各轴方向问题
-
@小鱼 在 FishBot里程计和IMU传感器数据融合 中说:
ros2 run robot_localization ekf_node --ros-args --params-file /path/to/your/params/file.yaml
这边按照您的步骤执行发现没有执行成功,是什么原因吗

改成launch文件执行也没运行起来
list一下好像也没有这个节点
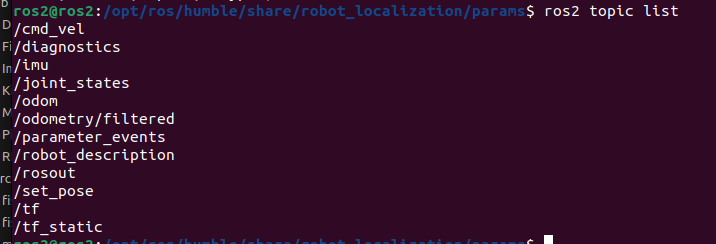
然后用命令执行:
ros2 run robot_localization ekf_node --ros-args --params-file /opt/ros/humble/share/robot_localization/params/ekf_example.yaml
也是啥都没有 请问是什么情况吗 -
1 1257261547 在 中 引用了 这个主题