使用地平线RDK 3X PI 2.0的板子通过串口连接到FishBot主控板上导致主控板卡死
-
你好,我用了地平线的板子,然后接入到FishBot主控板和雷达控制板,全部用切到串口模式,雷达可以正常连接并且使用,FishBot主控板用 microRos-agent 连不上,OLED卡住,按reset和boot按键全没反应,只能重启,time卡在0:00:03位置。但是如果我用WiFi模式启动,好像是没有问题。

-
@565499699 不接USB是否可以在串口模式运行,另外agent端的运行命令提供一下
-
@小鱼
如果是拔掉USB是正常运行没有问题,我尝试看看连接到电脑看看能不能正常使用。

-
@565499699 你的系统ros2版本是什么版本,默认的dds是什么版本的
-
@小鱼 ARM板子上是Ubuntu 20.04,ROS2 foxy,microRos-agent是使用 Foxy 分支 ,dds版本不清楚,怎么查看DDS默认版本?
-
@565499699 最好使用humble版本,因为固件是humble版本的固件,可能串口部分存在不兼容,另外地平线的板子的DDS应该是存在定制修改的版本,不确定和microros dds 是否兼容。
-
@小鱼 嗯嗯好的,谢谢,我先用排除法排除一下,看看是哪里的问题。如果有结果了,我会再次回复你的。
-
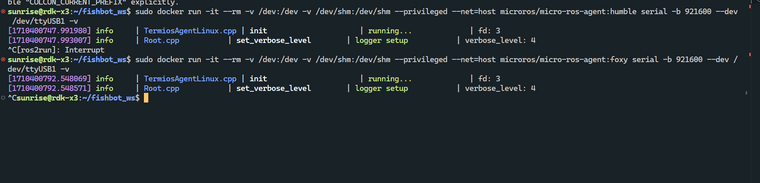
@小鱼 使用串口直接连PC,Docker版本的 microRos-agent两个分支(foxy/humble)都能正常工作。初步排除了是FishBot的问题。在地平线板子上用 Docker 版本的microRos-agent两个分支均不能正常工作。估计是地平线的板子问题。
-
@CaiNiao 我之前在树梅派上做过测试,没啥问题,你可以尝试在地平线上 使用docker,然后在docker中进行通信测试
-
@小鱼
两个分支我都试过了,不行,如果用 minicom 串口工具去连接,能拿到主控板发来串口数据,地平线的板子也是没有问题的。我看了一下 Agent 的 GitHub 上有类似的 issues,但是目前也没有啥头绪。
https://github.com/micro-ROS/micro-ROS-Agent/issues/123#issuecomment-1063601639
https://github.com/micro-ROS/micro-ROS-Agent/issues/64#issue-877042350
https://github.com/micro-ROS/micro-ROS-Agent/issues/187#issue-1653772723 -
@小鱼
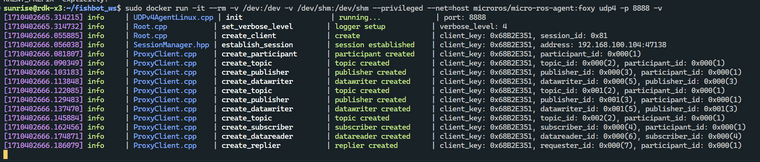
UDP 模式可以正常工作,暂时先不理了,估计Agent对地平线ARM板子插入的USB串口是有兼容性BUG。 -
@CaiNiao ok,我会持续关注这个问题
-
@小鱼
嗯嗯,感谢解答,希望搞一个fishbot-tool Docker ARM64版本,方便直接用板子直接修改fishbot中的配置,如果麻烦的话,就算了,我自己有时间自己弄。 -
@CaiNiao arm板一般很少配屏幕进行可视化,社区有一个无界面版本的配置助手,我推荐给你:https://fishros.org.cn/forum/topic/2101/fishbot-windows-linux下无界面下烧录和配置fishbot教程
-
@小鱼 非常感谢,我正需要这个,无界面最好了。