gazebo和simulink联合仿真,gazebo模型反馈的关节位置和simulink关节位置不一致
-
1、参考mathwork官网模型
https://www.mathworks.com/help/robotics/ug/configure-gazebo-for-co-simulation-of-manipulator.html#ConfigureGazeboAndSimulinkForCosimulationOfManipulatorsExample-5
2、上述示例没有找到.world文件的具体内容,自己写了一个简单的.world文件,
 测试通信成功
测试通信成功
3、参考上述示例的gazebo和simulink的通信模块
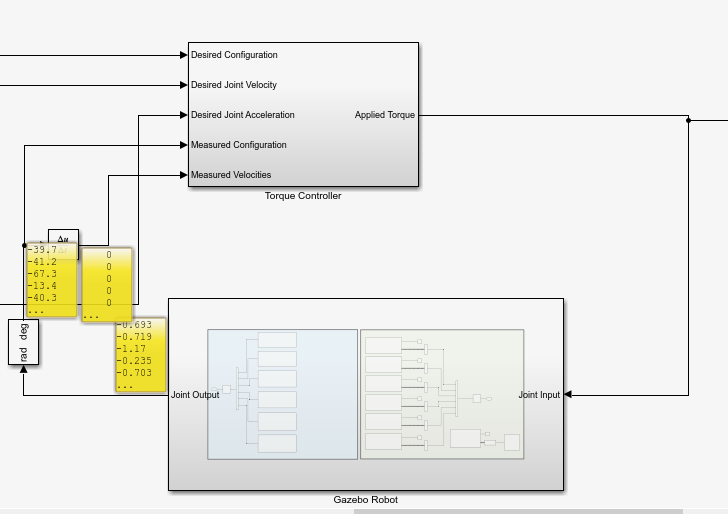 得到gazebo的位置和速度反馈输出到Torque controller
得到gazebo的位置和速度反馈输出到Torque controller
4、Torque controller的前三个输入信号就是轨迹规划得到的关节的位置 速度和加速度信号

5、点击run之后
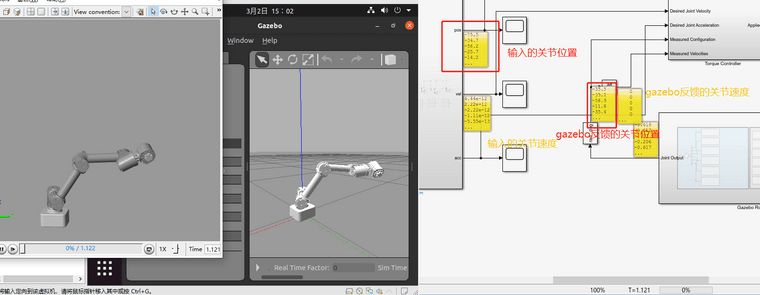
可以看到,Torque controller的前三个输入信号和gazebo的位置和速度信号数据不一致
gazebo的模型也没有按照simulink规划的轨迹进行运动。 -
@767015514 ROS 都是弧度制,不是角度制,这点别搞混了
-
@小鱼 感谢答复!我把simulink模型全部改为弧度,不知道是不是这样改呢
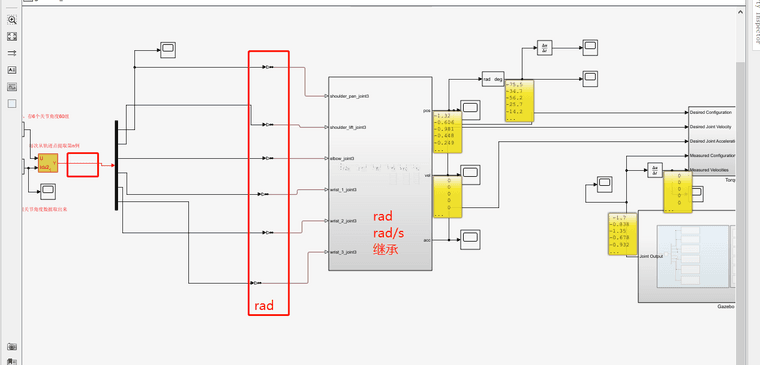
这样改了之后,还是一样的问题
卡了我太久了
-
7 767015514 将这个主题标记为已解决,在