agent 手动编译,不用docker,以及树莓派上使用micros-agent的方法
-
@2431039560 固件用的哪一个
-
@小鱼 最新V1.2.3的配置助手二驱板烧录的,具体是这个https://fishros.org.cn/forum/assets/uploads/files/1736172779188-fishbot_motion_control_v1.7.2.alpha.241229.bin
-
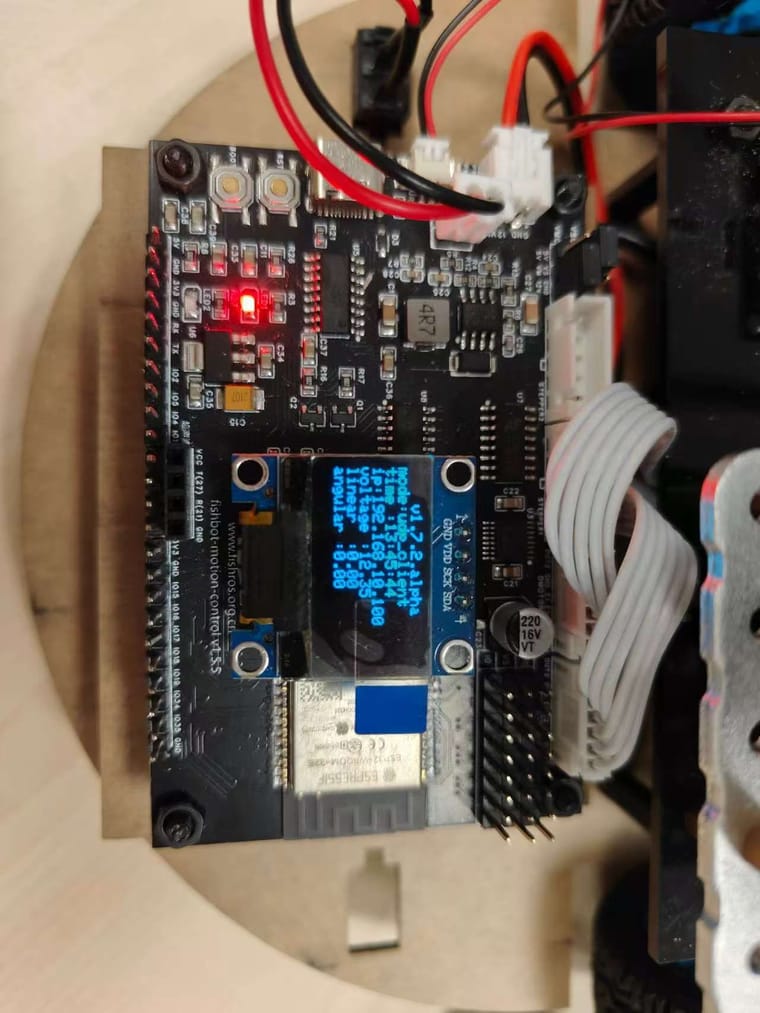
@2431039560 开关供电都正常吗,线连接是否正常,确认下控制命令是否发布出去了,比如开个新的终端订阅,小车的oled屏幕会不会闪烁
-
此回复已被删除! -
@小鱼 其他的好像都是正常的,然后cmd_vel发送出去了小车好像没收到,小车不会动,屏幕的线速度也都是0
-
@2431039560 agent用的docker版本的吗
-
@2431039560 有没有设置什么DOMAIN_ID
-
@小鱼 docker版本的好像下载不了,docker用一键安装以后get镜像那里出问题了,然后启动是这样的
拉镜像: Run CMD Task:[sudo docker pull ros:humble ] Error response from daemon: Get "https://registry-1.docker.io/v2/": net/http: request canceled while waiting for connection (Client.Timeout exceeded while awaiting headers) 启动不了: docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host registry.cn-hangzhou.aliyuncs.com/fishros/micro-ros-agent:$ROS_DISTRO udp4 --port 8888 -v6 docker: permission denied while trying to connect to the Docker daemon socket at unix:///var/run/docker.sock: Head "http://%2Fvar%2Frun%2Fdocker.sock/_ping": dial unix /var/run/docker.sock: connect: permission denied Run 'docker run --help' for more information然后DOMAIN_ID设为了0,这里我看站内有树莓派的教程说默认是=0
-
此回复已被删除! -
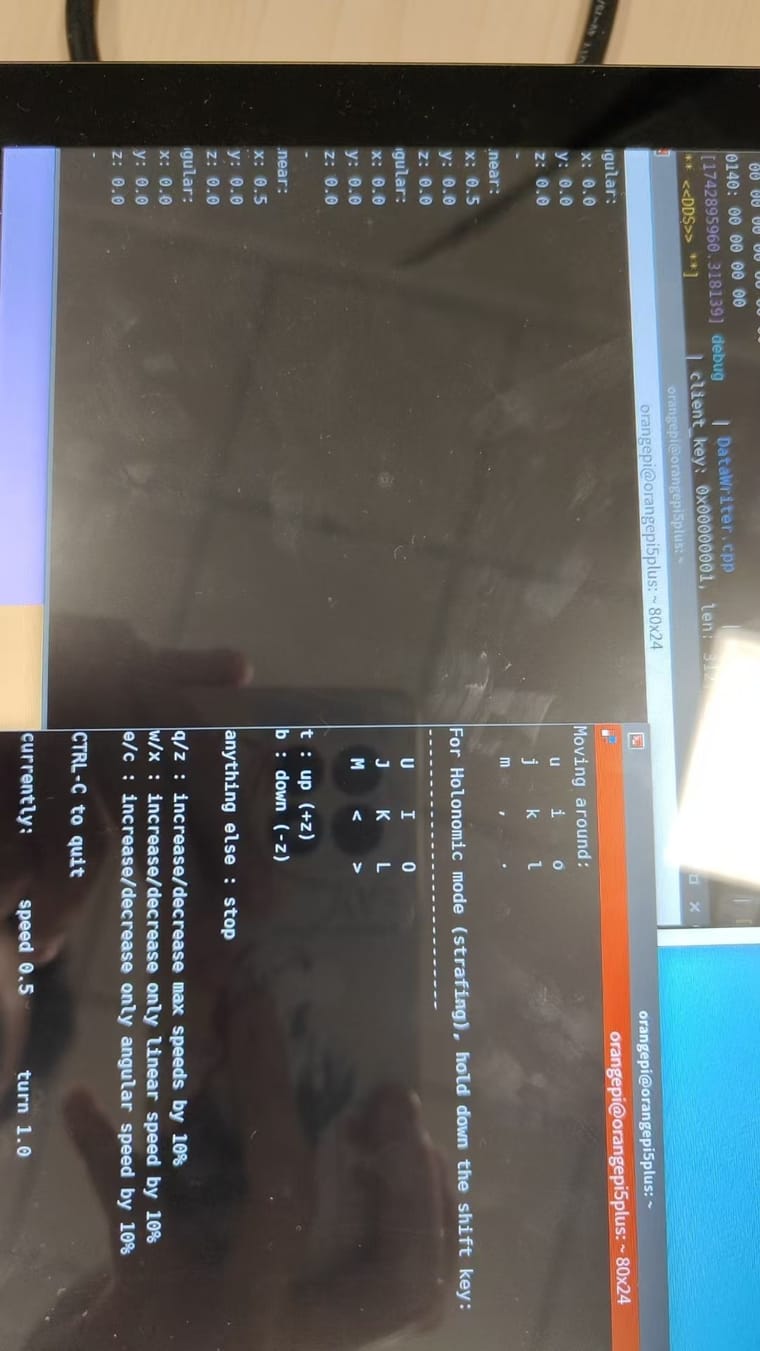
@小鱼 鱼,我把domain_id删了,然后docker也下好了,也可以启动的,但还是和之前一样,能发数据也能正常启动,小车也连上了但还是启动键盘控制后不会动,其他还需要配置什么嘛,要不要在PIO里重新上传一下
-
@2431039560 再试试docker的
sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host registry.cn-hangzhou.aliyuncs.com/fishros/micro-ros-agent:$ROS_DISTRO udp4 --port 8888 -v6