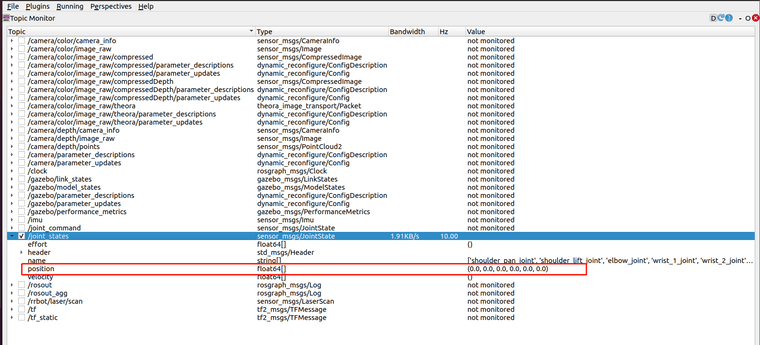
rqt查看话题发布情况,发现/joint_state的Position一直为0
-
1、实现了simulink同步控制gazebo机械臂仿真,也就是windows系统下的matlab搭建出机械臂的控制模型
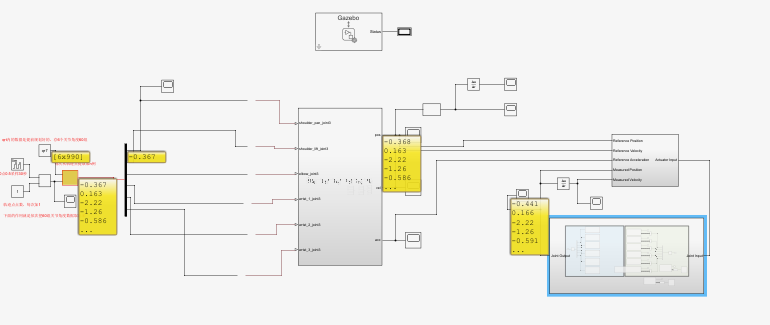
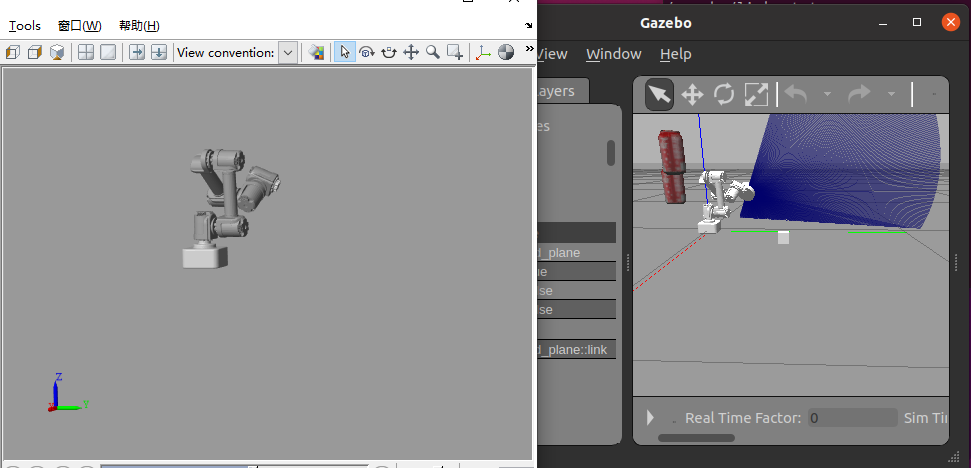
2、在ubuntu虚拟机20.04下有ros-noetic以及gazebo11,配置一些文件之后实现了simulink里面的机械臂的关节信息实时传递给gazebo机械臂,实现同步运行:
3、用rqt查看话题的发布情况如下:
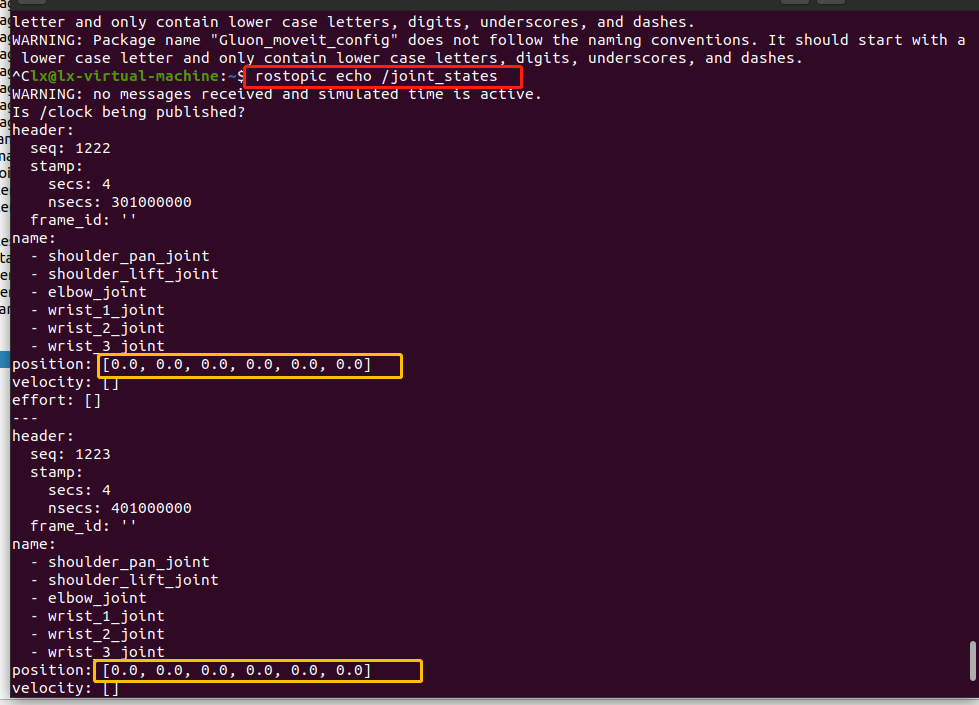
同时用命令获取信息得到同样为0
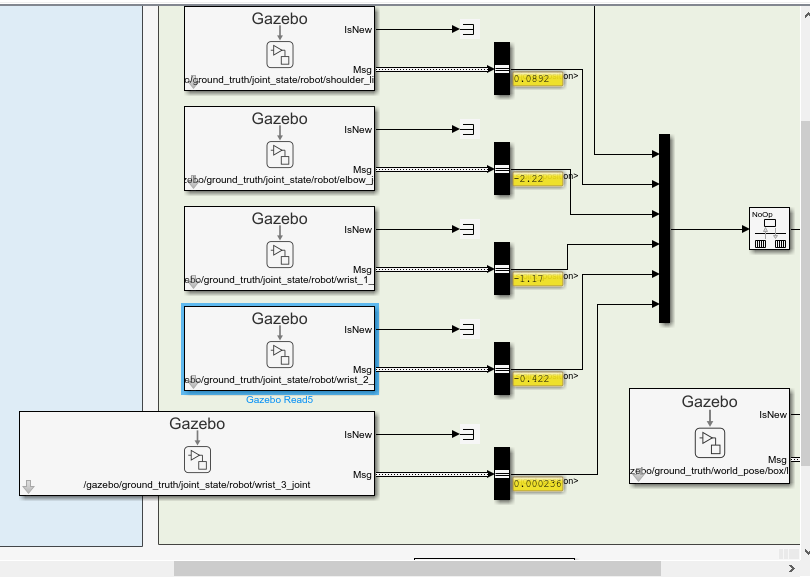
4、为什么会出现上述问题?simulink里面的回传模块是有数据的
5、如何解决上述问题?因为用matlab编程和ros实现通信的时候,matlab程序无法控制gazebo机械臂模型动起来。因为matlab编程的时候/joint_state的Position也一直为0
-
@767015514 /joint_states是gazebo 发布的吧,而simulink里面的话题并不是 /joint_states,而是

-
@小鱼 意思就是gazebo里面的控制器并没有控制,只是simulink里面的控制指令让gazebo机械臂运动起来了?