rviz2 在 odom 无法显示 pointcloud2 的消息
-
step to reproduce:
- ros2 launch fishbot_description gazebo.launch.py
- ros2 run tf2_ros static_transform_publisher 0 0 0 0 0 0 base_link camera_link
- launch realsense camera
problem:
目前是 在 rviz2 中, 如果我 把 globalOption 底下的 fixed_frame 设置为 base_link 时, 我可以看到 摄像头的 pointcloud 数据(Figure 1)但如果我设置为 odom 时, 就无法显示 pointcloud 的数据(Figure 2)
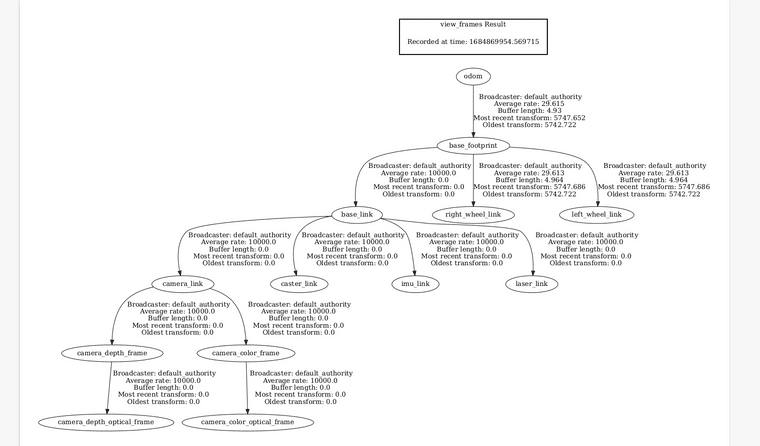
我尝试了 用 view_frame 去确认了 tf tree 的关系(Figure 3),发现有这个transform的结果。
所以我不知道错在哪里了。 请各位大佬帮忙看看。
Figure1
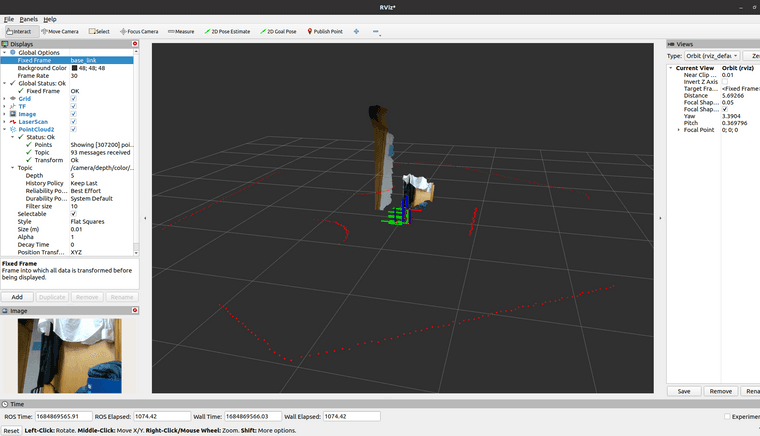
Figure 2
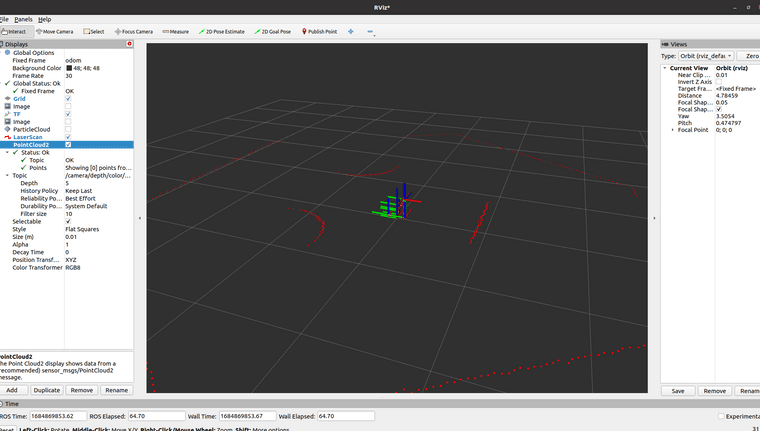 Figure 3
Figure 3Figure 3
-
杜 杜守钰 将这个主题转为问答主题,在