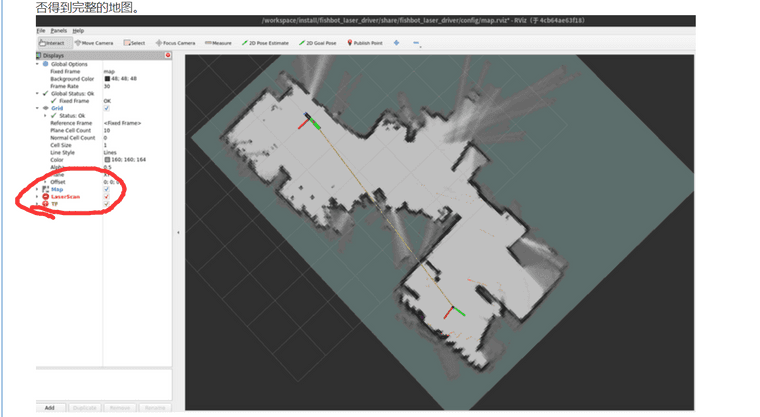
为啥建图跟导航的时候laser那个坐标都是不动的
-
-
@ljy1852783649

运行ros2 launch fishbot_bringup fishbot_bringup.launch.py,为啥左右轮就average rate有变化,而laser frame没变化呢? -
@ljy1852783649 laser_frame 是fixed到机器人本体上的,所以tf是静态的
@ljy1852783649
运行ros2 launch fishbot_bringup fishbot_bringup.launch.py,为啥左右轮就average rate有变化,而laser frame没变化呢?
@ljy1852783649 laser_frame 是fixed到机器人本体上的,所以tf是静态的