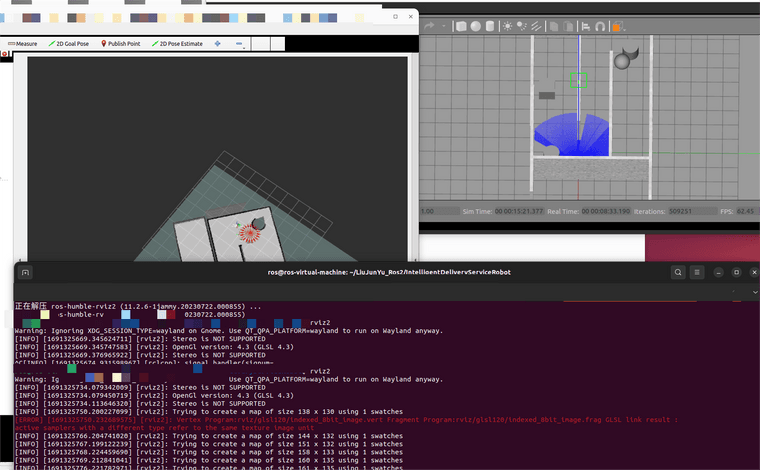
这是我的rviz2输出的日志
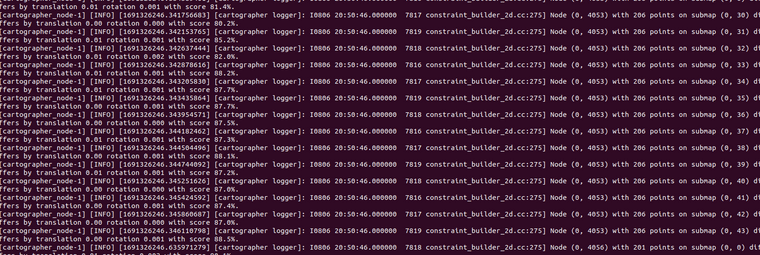
这是我的cartographer输出的日志
我想问为啥rviz2显示会报错[ERoR] [1091325758.2326875] [rviz]: Vertex Prograwrvtz/glsl26/indexed_8bit_inag.vrt fragent Progrannviagisl26jindexed Bbit_[irg.freg (.lL link resolt active samplers with a different type refer to the sane texture inage unit?
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
L
ljy1852783649 发布的最新帖子
-
运行cartographer时rviz报错问题请问怎么解决发布在 移动机器人制作
-
烧录最新固件问题发布在 综合问题
https://fishros.org.cn/forum/topic/936/fishbot教程-3-主控板固件烧录与配置/5
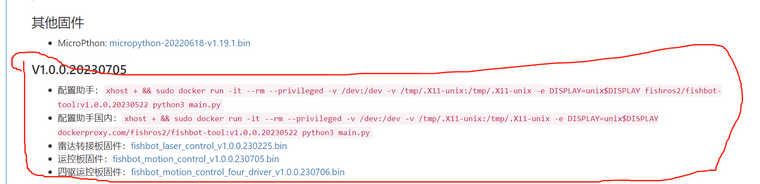
在这个教程中,我执行了xhost + && sudo docker run -it --rm --privileged -v /dev:/dev -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=unix$DISPLAY dockerproxy.com/fishros2/fishbot-tool:v1.0.0.20230522 python3 main.py来运行命令

但是我发现烧录的固件不是最新的,没有发出imu话题,我应该怎么做? -
RE: 为啥建图跟导航的时候laser那个坐标都是不动的发布在 综合问题
@ljy1852783649

运行ros2 launch fishbot_bringup fishbot_bringup.launch.py,为啥左右轮就average rate有变化,而laser frame没变化呢? -
RE: 如何让ros2运行某个节点或者所有Python节点指定自己虚拟环境的解释器和包发布在 综合问题
@小鱼 你的意思是在虚拟环境装ros2吗?我之前是ros装在系统没创建虚拟环境,好像运动节点都是调用系统Python的解释器。
-
如何让ros2运行某个节点或者所有Python节点指定自己虚拟环境的解释器和包发布在 综合问题
由于可能会用到很多的库,例如Pytorch、numba、scikit-image等等,我们一般都是用miniconda来创建虚拟环境的,但是当我写完代码移植到Python节点时候,我发现运行节点他使用的系统Python的解释器,这就导致我需要在系统Python解释器安装需要的库,这会显得很麻烦。
我尝试一些办法在解决这个问题,例如在Python节点的第一行使用#!/home/ros/miniconda3/bin/python,但是ros2 run <包名> <节点名>的时候他还是使用了系统的Python的解释器,请问有哪些办法呢? -
ROS2中python引用自定义py文件(自己写的.py文件)发布在 综合问题
我遇到这个帖子同样的问题,解决方法也是一样的。但是这个解决方法要求需要将原python文件下的所有package.function前的pacakge.给删除掉。但是当引用自己的模块文件多了以后,可能会出现不同模块的相同变量名会被覆盖,这个时候使用package.function可以避免这个问题,如果我要这么做的话,我应该怎么做。