Your browser does not seem to support JavaScript. As a result, your viewing experience will be diminished, and you have been placed in read-only mode.
Please download a browser that supports JavaScript, or enable it if it's disabled (i.e. NoScript).
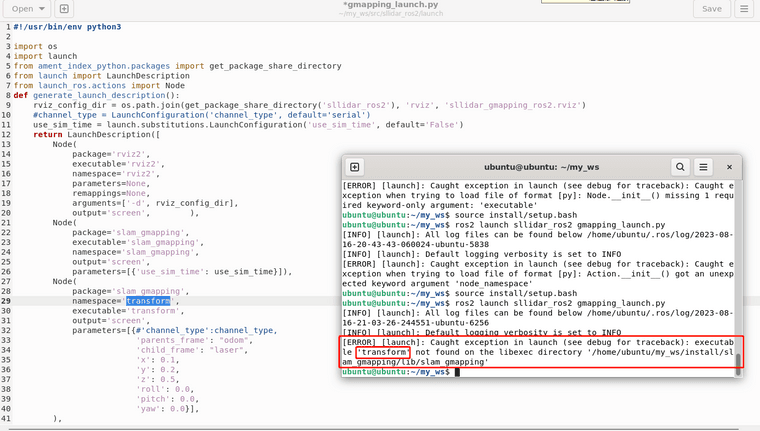
我用一键安装了ros2 的humble版本,上位机接了雷达,在雷达启动、扫描正常后,我运行“ros2 launch sllidar_ros2 gmapping_launch.py”出现error:executable 'transform' not found on the libexec directory '/home/ubuntu/my_ws/install/slam_gmapping/lib/slam_gmapping'。