手持雷达建图
-
我希望实现手持雷达建图,首先编译运行雷达:roslaunch rplidar_ros view_rplidar_a2m8.launch,然后根据https://link.zhihu.com/?target=https%3A//mp.weixin.qq.com/s%3F__biz%3DMzkzMzI2MTU2Nw%3D%3D%26mid%3D2247487386%26idx%3D1%26sn%3D0f9de6257c35ff843582c3ad9e3144f2%26chksm%3Dc24e760af539ff1c84afbbbd52013732d4f8aa9c7a346cdd01231849fe24660101ecdfc9ee9b%26token%3D895124457%26lang%3Dzh_CN%23rd,该链接内容,修改frame_id = laser(是我自己雷达ID),然后编译运行,cartographer_pure_laser.launch.py,为什么无法显示地图,出现以下画面:

请问是哪里出现了问题吗? -
-
@小鱼
这个是a2m8.py文件 ,
,
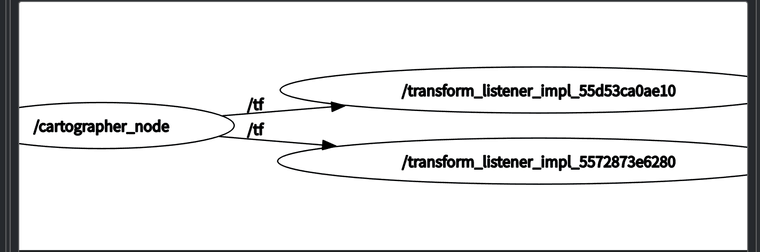
下面是tf,
-
@1991623683 tf不是这样看的
-
@1991623683 跑一下 ros2 run tf2_tools view_frames 然后看一下那个生产的pdf