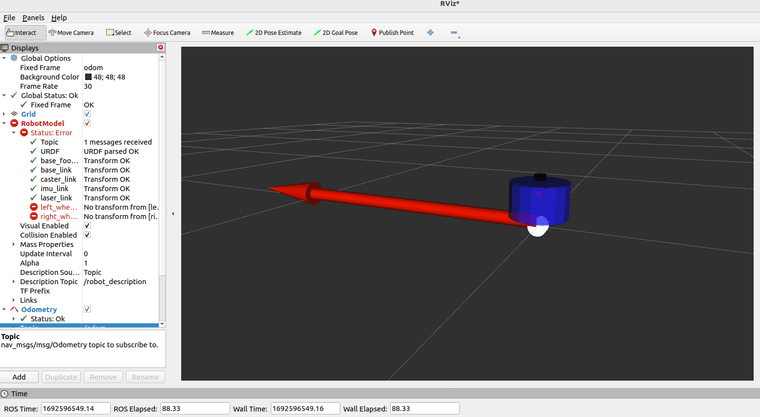
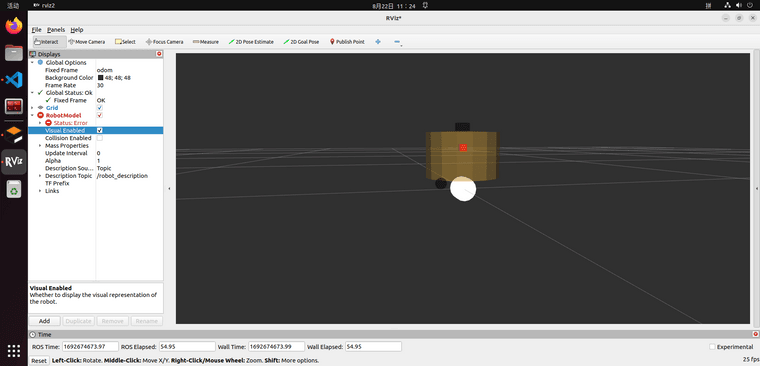
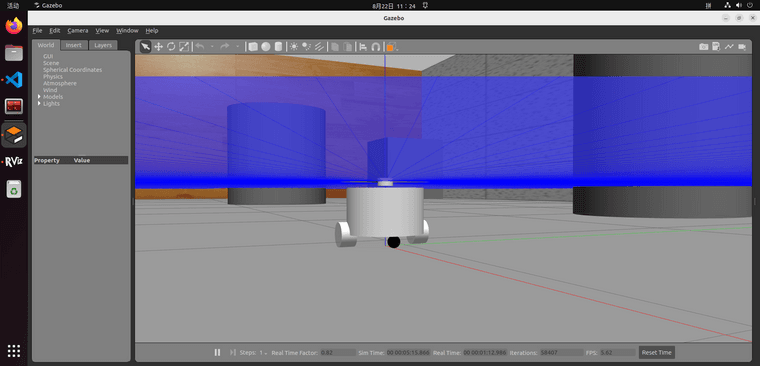
启动gazebo仿真环境后,rviz2中model的左右车轮link报错
-
-
@927348581 给一下你的所有配置
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
问题一定要描述清楚,终端打印一定复制粘贴,方便回答者检索和引用(你可以在linux系统上打开浏览器进社区)
基本的Markdown语法一定要学习下,有的小伙伴图片代码一团糟
提问时一定要提供尽可能多的信息(系统版本,ROS版本,前后操作,终端日志),包括你的目的,比如你其实想装装某个库遇到问题,不要只说这个问题,因为可能有更好的替代方案
先搜索再提问,很多问题其实都有解决方案,确保你自己对自己的问题有一定了解再提问
尽量一句话说完,不要把社区当微信聊天一样用,每一个回复都尽量提供更多的的信息。 -
@小鱼
这是urdf文件
<?xml version="1.0"?>
<robot name="fishbot"><!-- Robot Footprint --> <link name="base_footprint" /> <joint name="base_joint" type="fixed"> <parent link="base_footprint" /> <child link="base_link" /> <origin xyz="0.0 0.0 0.076" rpy="0 0 0" /> </joint> <!-- base link --> <link name="base_link"> <visual> <origin xyz="0 0 0.0" rpy="0 0 0" /> <geometry> <cylinder length="0.12" radius="0.10" /> </geometry> <material name="yellow"> <color rgba="0.8 0.6 0.2 0.5" /> </material> </visual> <collision> <origin xyz="0 0 0.0" rpy="0 0 0" /> <geometry> <cylinder length="0.12" radius="0.10" /> </geometry> <material name="yellow"> <color rgba="0.8 0.6 0.2 0.5" /> </material> </collision> <inertial> <mass value="0.2" /> <inertia ixx="0.0122666" ixy="0" ixz="0" iyy="0.0122666" iyz="0" izz="0.02" /> </inertial> </link> <!-- 雷达link --> <link name="laser_link"> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <cylinder length="0.02" radius="0.02" /> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <cylinder length="0.02" radius="0.02" /> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5" /> </material> </collision> <inertial> <mass value="0.1" /> <inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036" /> </inertial> </link> <!-- 雷达与地盘的关节 --> <joint name="laser_joint" type="fixed"> <parent link="base_link" /> <child link="laser_link" /> <origin xyz="0 0 0.075" /> </joint> <!-- 传感器link --> <link name="imu_link"> <visual> <origin xyz="0 0 0.0" rpy="0 0 0" /> <geometry> <box size="0.02 0.02 0.02" /> </geometry> </visual> <collision> <origin xyz="0 0 0.0" rpy="0 0 0" /> <geometry> <box size="0.02 0.02 0.02" /> </geometry> </collision> <inertial> <mass value="0.1" /> <inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036" /> </inertial> </link> <!-- imu joint --> <joint name="imu_joint" type="fixed"> <parent link="base_link" /> <child link="imu_link" /> <origin xyz="0 0 0.02" /> </joint> <!-- 左车轮 --> <link name="left_wheel_link"> <visual> <origin xyz="0 0 0" rpy="1.57079 0 0" /> <geometry> <cylinder length="0.04" radius="0.032" /> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="1.57079 0 0" /> <geometry> <cylinder length="0.04" radius="0.032" /> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5" /> </material> </collision> <inertial> <mass value="0.2" /> <inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036" /> </inertial> </link> <!-- 右车轮 --> <link name="right_wheel_link"> <visual> <origin xyz="0 0 0" rpy="1.57079 0 0" /> <geometry> <cylinder length="0.04" radius="0.032" /> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="1.57079 0 0" /> <geometry> <cylinder length="0.04" radius="0.032" /> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5" /> </material> </collision> <inertial> <mass value="0.2" /> <inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036" /> </inertial> </link> <!-- 左车轮关节 --> <joint name="left_wheel_joint" type="continuous"> <parent link="base_link" /> <child link="left_wheel_link" /> <origin xyz="-0.02 0.10 -0.06" /> <axis xyz="0 1 0" /> </joint> <!-- 右车轮关节 --> <joint name="right_wheel_joint" type="continuous"> <parent link="base_link" /> <child link="right_wheel_link" /> <origin xyz="-0.02 -0.10 -0.06" /> <axis xyz="0 1 0" /> </joint> <!-- 支撑车轮link --> <link name="caster_link"> <visual> <origin xyz="0 0 0" rpy="1.57079 0 0" /> <geometry> <sphere radius="0.016" /> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="1.57079 0 0" /> <geometry> <sphere radius="0.016" /> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5" /> </material> </collision> <inertial> <mass value="0.02" /> <inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036" /> </inertial> </link> <!-- 支撑车轮关节 --> <joint name="caster_joint" type="fixed"> <parent link="base_link" /> <child link="caster_link" /> <origin xyz="0.06 0.0 -0.076" /> <axis xyz="0 1 0" /> </joint> <!-- 设置连杆仿真属性 --> <gazebo reference="caster_link"> <material>Gazebo/Black</material> </gazebo> <gazebo reference="caster_link"> <!-- mu 摩擦力 --> <mu1 value="0.0" /> <mu2 value="0.0" /> <!-- kp kd 刚性系数 --> <kp value="1000000.0" /> <kd value="10.0" /> <!-- <fdir1 value="0 0 1"/> --> </gazebo> <gazebo> <!-- plugin -插件 --> <plugin name='diff_drive' filename='libgazebo_ros_diff_drive.so'> <!-- ros相关配置 --> <ros> <namespace>/</namespace> <!-- 话题重映射 --> <remapping>cmd_vel:=cmd_vel</remapping> <remapping>odom:=odom</remapping> </ros> <!-- 数据更新速率 --> <update_rate>30</update_rate> <!-- 车轮关节名称 --> <left_joint>left_wheel_joint</left_joint> <right_joint>right_wheel_joint</right_joint> <!-- kinematics --> <!-- 左右车轮间距 --> <wheel_separation>0.2</wheel_separation> <!-- 车轮直径 --> <wheel_diameter>0.065</wheel_diameter> <!-- limits --> <!-- 车轮的最大力矩 --> <max_wheel_torque>20</max_wheel_torque> <!-- 车轮最大的加速度 --> <max_wheel_acceleration>1.0</max_wheel_acceleration> <!-- output --> <!-- 是否发布里程计 --> <publish_odom>true</publish_odom> <!-- 是否发布里程计的tf开关 --> <publish_odom_tf>true</publish_odom_tf> <!-- 是否发布车轮的tf数据开关 --> <publish_wheel_tf>false</publish_wheel_tf> <!-- 里程计的framed ID,最终体现在话题和TF上 --> <odometry_frame>odom</odometry_frame> <odometry_topic>odom</odometry_topic> <!-- 机器人的基础frame的ID --> <robot_base_frame>base_footprint</robot_base_frame> </plugin> <plugin name="fishbot_joint_state" filename="libgazebo_ros_joint_state_publisher.so"> <ros> <remapping>~/out:=joint_states</remapping> </ros> <update_rate>30</update_rate> <joint_name>right_wheel_joint</joint_name> <joint_name>left_wheel_joint</joint_name> </plugin> </gazebo> <!-- 将gazebo中的传感器连接到连杆link中 --> <gazebo reference="imu_link"> <!-- sensor 传感器 --> <sensor name="imu_sensor" type="imu"> <plugin filename="libgazebo_ros_imu_sensor.so" name="imu_plugin"> <ros> <namespace>/</namespace> <remapping>~/out:=imu</remapping> </ros> <initial_orientation_as_reference>false</initial_orientation_as_reference> </plugin> <always_on>true</always_on> <update_rate>100</update_rate> <!--更新速率--> <visualize>true</visualize> <!-- 是否可视化--> <imu> <angular_velocity> <!--角速度--> <x> <noise type="gaussian"> <!-- 高斯噪声 --> <mean>0.0</mean> <!-- 平均值--> <stddev>2e-4</stddev> <!-- 标准差 --> <bias_mean>0.0000075</bias_mean> <!-- 平均值偏差--> <bias_stddev>0.0000008</bias_stddev> <!-- 标准差偏差--> </noise> </x> <y> <noise type="gaussian"> <mean>0.0</mean> <stddev>2e-4</stddev> <bias_mean>0.0000075</bias_mean> <bias_stddev>0.0000008</bias_stddev> </noise> </y> <z> <noise type="gaussian"> <mean>0.0</mean> <stddev>2e-4</stddev> <bias_mean>0.0000075</bias_mean> <bias_stddev>0.0000008</bias_stddev> </noise> </z> </angular_velocity> <linear_acceleration> <!--加速度--> <x> <noise type="gaussian"> <mean>0.0</mean> <stddev>1.7e-2</stddev> <bias_mean>0.1</bias_mean> <bias_stddev>0.001</bias_stddev> </noise> </x> <y> <noise type="gaussian"> <mean>0.0</mean> <stddev>1.7e-2</stddev> <bias_mean>0.1</bias_mean> <bias_stddev>0.001</bias_stddev> </noise> </y> <z> <noise type="gaussian"> <mean>0.0</mean> <stddev>1.7e-2</stddev> <bias_mean>0.1</bias_mean> <bias_stddev>0.001</bias_stddev> </noise> </z> </linear_acceleration> </imu> </sensor> </gazebo> <gazebo reference="laser_link"> <sensor name="laser_sensor" type="ray"> <always_on>true</always_on> <!-- 是否可视化 --> <visualize>true</visualize> <update_rate>5</update_rate> <!-- 雷达的joint中位置的设置值 位姿信息--> <pose>0 0 0.075 0 0 0</pose> <ray> <!-- 扫描属性 --> <scan> <!-- 水平位置 --> <horizontal> <!-- 采样数量 雷达旋转一周发射360道射线 --> <samples>360</samples> <resolution>1</resolution> <!-- 雷达采样范围 一圈6.28个弧度--> <min_angle>0.000000</min_angle> <max_angle>6.280000</max_angle> </horizontal> </scan> <!-- 雷达扫描范围 --> <range> <!-- 0.12m ~ 0.35m 应该是半径--> <min>0.120000</min> <max>10</max> <!-- 分辨率 --> <resolution>0.015000</resolution> </range> <!-- 噪声 --> <noise> <type>gaussian</type> <mean>0.0</mean> <!-- 平均值 --> <stddev>0.01</stddev> <!-- 标准差 --> </noise> </ray> <plugin name="laserscan" filename="libgazebo_ros_ray_sensor.so"> <ros> <!-- <namespace>/tb3</namespace> --> <remapping>~/out:=scan</remapping> </ros> <output_type>sensor_msgs/LaserScan</output_type> <frame_name>laser_link</frame_name> </plugin> </sensor> </gazebo></robot>
这是launch文件
import os
from launch import LaunchDescription
from launch.actions import ExecuteProcess
from launch_ros.actions import Node
from launch_ros.substitutions import FindPackageShare
from ament_index_python.packages import get_package_share_directorydef generate_launch_description():
robot_name_in_model = 'fishbot'ld = LaunchDescription() urdf_model_path = os.path.join(get_package_share_directory("gazebo_exercise"),"urdf","urdf","demo02_gazebo.launch.urdf") #加载gazebo的world文件 -- 在终端启动gazebo后面直接加上world的路径 gazebo_world_path = os.path.join(get_package_share_directory("gazebo_exercise"),"world","box_house.world") # Start Gazebo server start_gazebo_cmd = ExecuteProcess( cmd=['gazebo', '--verbose','-s', 'libgazebo_ros_init.so', '-s', 'libgazebo_ros_factory.so',gazebo_world_path], output='screen') # Launch the robot spawn_entity_cmd = Node( package='gazebo_ros', executable='spawn_entity.py', arguments=['-entity', robot_name_in_model, '-file', urdf_model_path ], output='both') # Start Robot State publisher start_robot_state_publisher_cmd = Node( package='robot_state_publisher', executable='robot_state_publisher', arguments=[urdf_model_path] ) joint_state_publisher_node = Node( package='joint_state_publisher', executable='joint_state_publisher', name='joint_state_publisher', arguments=[urdf_model_path] ) # Launch RViz start_rviz_cmd = Node( package='rviz2', executable='rviz2', name='rviz2', output='screen', # arguments=['-d', default_rviz_config_path] ) ld.add_action(start_gazebo_cmd) ld.add_action(spawn_entity_cmd) ld.add_action(start_robot_state_publisher_cmd) ld.add_action(joint_state_publisher_node) ld.add_action(start_rviz_cmd) return ldgazebo仿真环境小车没有问题,但是rviz2中出现车轮报错问题
-
-
@927348581 在 启动gazebo仿真环境后,rviz2中model的左右车轮link报错 中说:
<!-- 是否发布车轮的tf数据开关 --> <publish_wheel_tf>false</publish_wheel_tf>这里改成true
-
@小鱼 改了之后没有效果,还是一样报错
-
@927348581 重新编译,然后看看tf
-
此回复已被删除! -
@小鱼 我也有同样的问题,按照历史记录的提示修改,也是同样的报错,请再给出些修改思路,谢谢