在ros-9.3为FishBot配置两轮差速控制插件
-
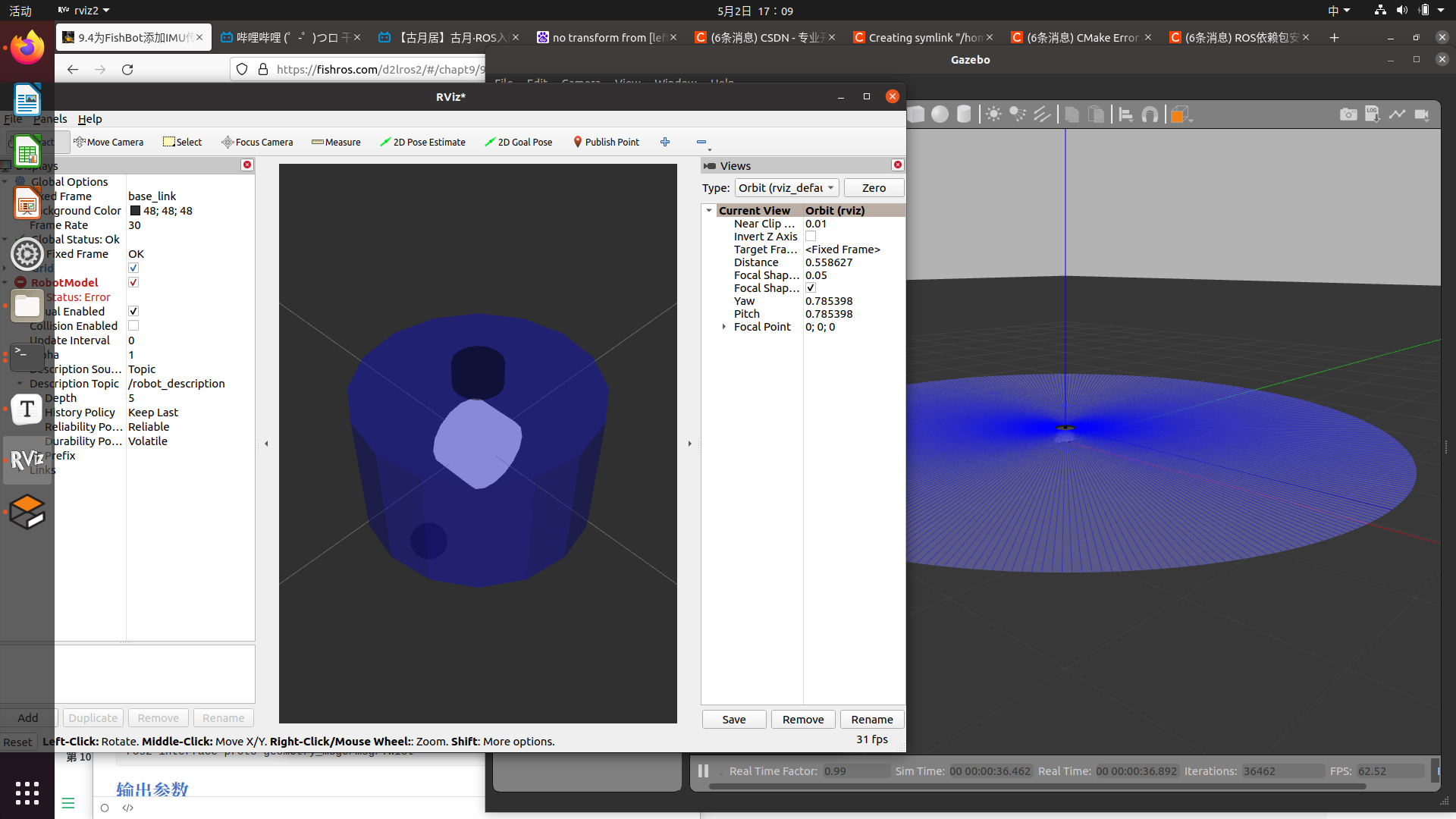
报错1.启动的时候gazebo可以显示但是,同时也加载了rviz,并出现错误的模型。
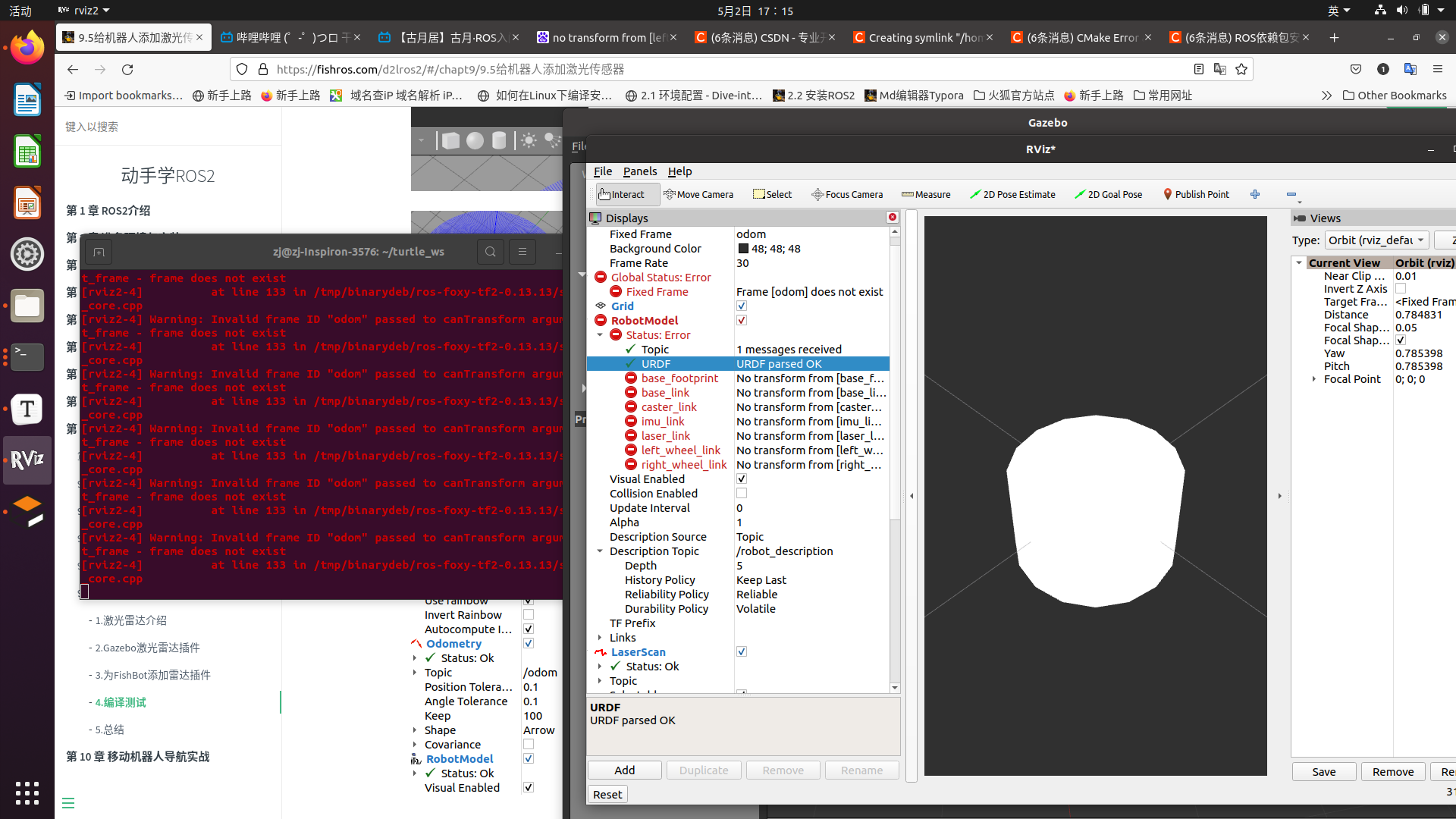
报错2.在rviz修改成odom后直接报错
-
@15014960082 贴一下你的URDF配置和launch文件配置
报错1.启动的时候gazebo可以显示但是,同时也加载了rviz,并出现错误的模型。
报错2.在rviz修改成odom后直接报错
@15014960082 贴一下你的URDF配置和launch文件配置